Our muscles are nature’s perfect actuators—devices that turn energy into motion. For their size, muscle fibers are more powerful and precise than most synthetic actuators. They can even heal from damage and grow stronger with exercise.
For these reasons, engineers are exploring ways to power robots with natural muscles. They’ve demonstrated a handful of “biohybrid” robots that use muscle-based actuators to power artificial skeletons that walk, swim, pump, and grip. But for every bot, there’s a very different build and no general blueprint for how to get the most out of muscles for any given robot design.
Now, MIT engineers have developed a spring-like device that could be used as a basic skeleton-like module for almost any muscle-bound bot. The new spring, or “flexure,” is designed to get the most work out of any attached muscle tissues. Like a leg press that’s fit with just the right amount of weight, the device maximizes the amount of movement that a muscle can naturally produce.
The researchers found that when they fit a ring of muscle tissue onto the device, much like a rubber band stretched around two posts, the muscle pulled on the spring reliably and repeatedly and stretched it five times more, compared with other previous device designs.
The team sees the flexure design as a new building block that can be combined with other flexures to build any configuration of artificial skeletons. Engineers can then fit the skeletons with muscle tissues to power their movements.
“These flexures are like a skeleton that people can now use to turn muscle actuation into multiple degrees of freedom of motion in a very predictable way,” says Ritu Raman, the Brit and Alex d’Arbeloff Career Development Professor in Engineering Design at MIT. “We are giving roboticists a new set of rules to make powerful and precise muscle-powered robots that do interesting things.”
Raman and her colleagues report the details of the new flexure design in a paper appearing today in the journal Advanced Intelligent Systems. The study’s MIT co-authors include Naomi Lynch ’12, SM ’23; undergraduate Tara Sheehan; graduate students Nicolas Castro, Laura Rosado, and Brandon Rios; and professor of mechanical engineering Martin Culpepper.
Muscle pull
When left alone in a petri dish in favorable conditions, muscle tissue will contract on its own but in directions that are not entirely predictable or of much use.
“If the muscle is not attached to anything, it will move a lot, but with huge variability, where it’s just flailing around in the liquid,” Raman says.
Engineers typically attach a band of muscle tissue between two small, flexible posts to get a muscle to work like a mechanical actuator. As the muscle band naturally contracts, it can bend the posts and pull them together, producing some movement that would ideally power part of a robotic skeleton. However, in these designs, muscles have produced limited movement, mainly because the tissues are so variable in how they contact the posts.
Depending on where the muscles are placed on the posts and how much of the muscle surface is touching the post, the muscles may succeed in pulling the posts together but, at other times, may wobble around in uncontrollable ways.
Raman’s group looked to design a skeleton that focuses and maximizes a muscle’s contractions regardless of exactly where and how it is placed on a skeleton to generate the most movement in a predictable, reliable way.
“The question is: How do we design a skeleton that most efficiently uses the force the muscle is generating?” Raman says.
The researchers first considered the multiple directions that a muscle can naturally move. They reasoned that if a muscle is to pull two posts together along a specific direction, the posts should be connected to a spring that only allows them to move in that direction when pulled.
“We need a device that is very soft and flexible in one direction and very stiff in all other directions so that when a muscle contracts, all that force gets efficiently converted into motion in one direction,” Raman says.
Soft flex
As it turns out, Raman found many such devices in Professor Martin Culpepper’s lab. Culpepper’s group at MIT specializes in the design and fabrication of machine elements, such as miniature actuators, bearings, and other mechanisms that can be built into machines and systems to enable ultraprecise movement, measurement, and control for a wide variety of applications.
Among the group’s precision machined elements are flexures—spring-like devices, often made from parallel beams, that can flex and stretch with nanometer precision.
“Depending on how thin and far apart the beams are, you can change how stiff the spring appears to be,” Raman says.
She and Culpepper teamed up to design a flexure specifically tailored with a configuration and stiffness to enable muscle tissue to contract and maximally stretch the spring naturally. The team designed the device’s configuration and dimensions based on numerous calculations they carried out to relate a muscle’s natural forces with a flexure’s stiffness and degree of movement.
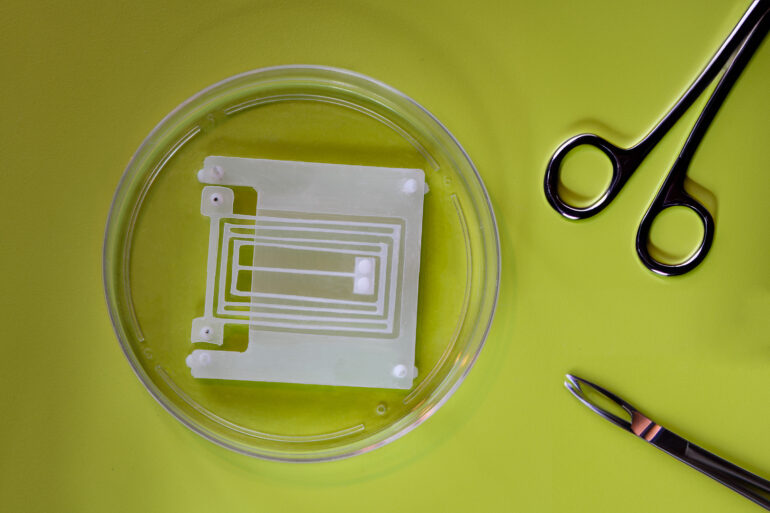
The flexure they ultimately designed is 1/100 the stiffness of the muscle tissue itself. The device resembles a miniature, accordion-like structure, the corners of which are pinned to an underlying base by a small post, which sits near a neighboring post that fits directly onto the base.
Raman then wrapped a band of muscle around the two corner posts (the team molded the bands from live muscle fibers that they grew from mouse cells), and measured how close the posts were pulled together as the muscle band contracted.
The team found that the flexure’s configuration enabled the muscle band to contract mostly along the direction between the two posts. This focused contraction allowed the muscle to pull the posts much closer together—five times closer—compared with previous muscle actuator designs.

“The flexure is a skeleton that we designed to be very soft and flexible in one direction and very stiff in all other directions,” Raman says. “When the muscle contracts, all the force is converted into movement in that direction. It’s a huge magnification.”
The team found they could use the device to measure muscle performance and endurance precisely. When they varied the frequency of muscle contractions (for instance, stimulating the bands to contract once versus four times per second), they observed that the muscles “grew tired” at higher frequencies and didn’t generate as much pull.
“Looking at how quickly our muscles get tired and how we can exercise them to have high-endurance responses—this is what we can uncover with this platform,” Raman says.
The researchers are now adapting and combining flexures to build precise, articulated, and reliable robots, powered by natural muscles.
“An example of a robot we are trying to build in the future is a surgical robot that can perform minimally invasive procedures inside the body,” Raman says. “Technically, muscles can power robots of any size, but we are particularly excited in making small robots, as this is where biological actuators excel in terms of strength, efficiency, and adaptability.”
More information:
Naomi Lynch et al, Enhancing and Decoding the Performance of Muscle Actuators with Flexures, Advanced Intelligent Systems (2024). DOI: 10.1002/aisy.202300834
Provided by
Massachusetts Institute of Technology
This story is republished courtesy of MIT News (web.mit.edu/newsoffice/), a popular site that covers news about MIT research, innovation and teaching.
Citation:
Engineers design flexible ‘skeletons’ for soft, muscle-powered robots (2024, April 8)

