Like waves sweeping through tiny stadium crowds, microscopic machines engineered by Cornell researchers can autonomously synchronize their movements, opening new possibilities for the use of microrobots in drug delivery, chemical mixing and environmental remediation, among other applications.
The research is the first to demonstrate synchronization in microscopic machines equipped with complementary metal-oxide-semiconductor oscillators, according to a study published Nov. 27 in Science Robotics by co-senior authors Alyssa Apsel, the IBM Professor of Engineering and director of the School of Electrical and Computer Engineering, and Itai Cohen, professor of physics in the College of Arts and Sciences and chair of the Department of Design Tech.
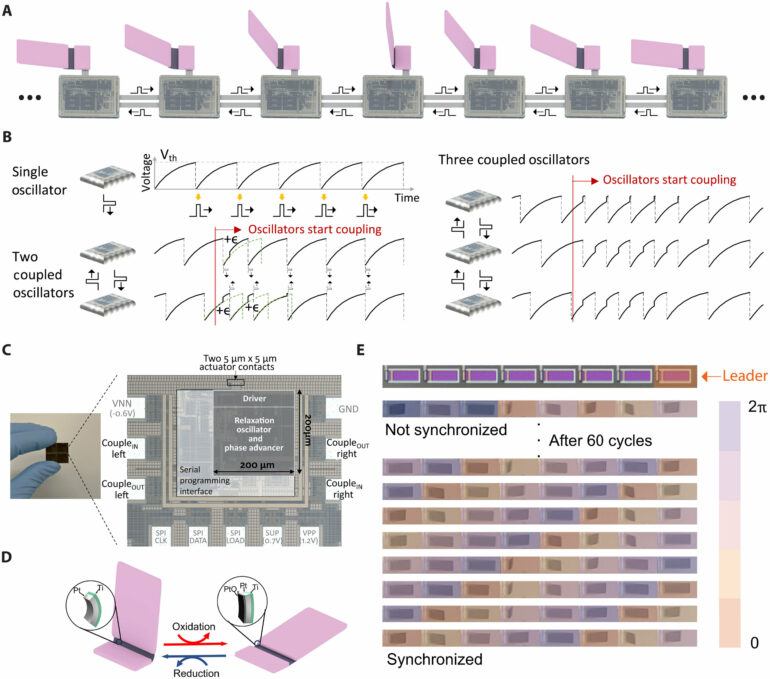
The machines coordinate by exchanging electronic pulses until the entire system is aligned with the fastest oscillator. Each machine features a bending paddle actuator that is only 7 nanometers thick and flexes when activated, mimicking the motion of a person sitting and standing during a stadium wave.
“The oscillators are very low power—sub-nanowatt—and operate with low complexity,” Apsel said. “We’re essentially designing local timing systems that communicate with each other to produce global behaviors. This approach is ideal for microscale machines that lack the power, capability or space to be wired over long distances.”
The synchronization relies on a pulsed-coupling technique in which oscillators send periodic electronic signals that adjust the timing of neighboring machines, aligning their movements without the need for centralized control. The strategy was inspired by earlier work on coupled oscillator systems by mathematicians—including at Cornell—who developed theoretical frameworks to model “internal clocks” in natural phenomena such as fireflies flashing in unison or heart cells beating together.
“This decentralized approach allows the system to self-correct and maintain synchronization even when conditions change or external disturbances occur,” said Milad Taghavi, Ph.D. ’21, who co-led the research with Wei Wang, Ph.D. ’23.
“If a group becomes severed, the technique ensures that each sub-group can continue to synchronize independently. Over time, if the groups are reconnected, the shared pulses will allow them to seamlessly reestablish synchronization.”
The researchers successfully synchronized arrays of up to 16 micromachines in both linear and two-dimensional configurations, and said minimal adjustments are required to scale to larger networks. This scalability makes it possible to coordinate increasingly complex swarms of microrobots, enabling applications such as fluidic transport for drug delivery, chemical mixing and environmental cleanup, as well as collaborative construction at the microscale.
“It also paves the way to making elastronic materials where electronics are incorporated at each material element to create emergent behaviors that cannot be achieved in natural systems,” Cohen said.
The researchers plan to continue their work on micromachines, Apsel said, with future projects potentially including coordinated microrobots that mimic inchworms or even microrobots that can split into multiple, autonomous pieces.

“Engineers have made enormous strides in being able to make these tiny machines that can move and even sense their environment, but it’s difficult to find really elegant methods to get them to operate collectively,” Apsel said. “This paper shows that you can use ideas from biology, ideas from nature, and exploit those in order to demonstrate collective behaviors.”
More information:
Milad Taghavi et al, Coordinated behavior of autonomous microscopic machines through local electronic pulse coupling, Science Robotics (2024). DOI: 10.1126/scirobotics.adn8067
Provided by
Cornell University
Citation:
Engineering micromachines that can autonomously coordinate using electronic pulses (2024, December 6)

