Researchers from North Carolina State University have demonstrated miniature soft hydraulic actuators that can be used to control the deformation and motion of soft robots that are less than a millimeter thick. The researchers have also demonstrated that this technique works with shape memory materials, allowing users to repeatedly lock the soft robots into a desired shape and return to the original shape as needed.
“Soft robotics holds promise for many applications, but it is challenging to design the actuators that drive the motion of soft robots on a small scale,” says Jie Yin, corresponding author of a paper on the work and an associate professor of mechanical and aerospace engineering at NC State.
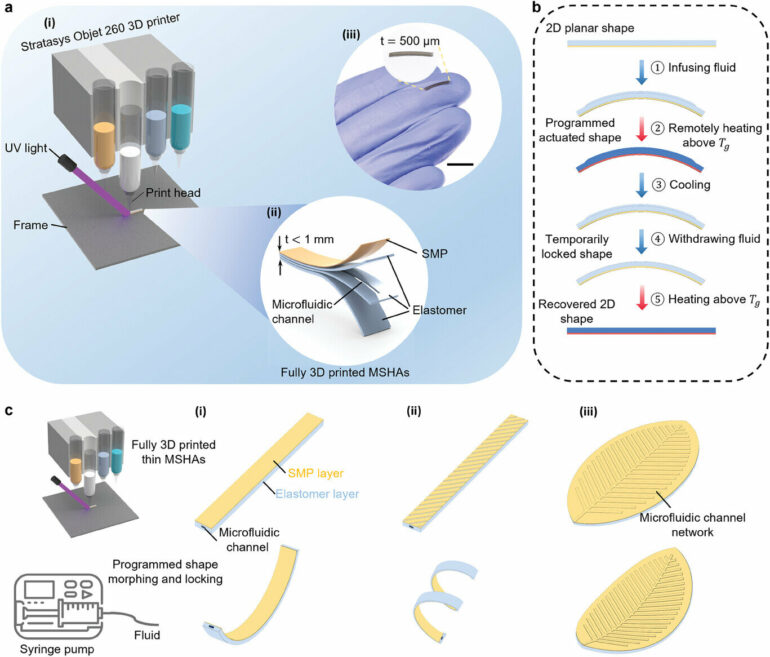
“Our approach makes use of commercially available multi-material 3D printing technologies and shape memory polymers to create soft actuators on a microscale that allow us to control very small soft robots, which allows for exceptional control and delicacy.”
The new technique relies on creating soft robots that consist of two layers. The first layer is a flexible polymer that is created using 3D printing technologies and incorporates a pattern of microfluidic channels—essentially very small tubes running through the material. The second layer is a flexible shape memory polymer. Altogether, the soft robot is only 0.8 millimeters thick.
By pumping fluid into the microfluidic channels, users create hydraulic pressure that forces the soft robot to move and change shape. The pattern of microfluidic channels controls the motion and shape change of the soft robot—whether it bends, twists, or so on. In addition, the amount of fluid being introduced, and how quickly it is introduced, controls how quickly the soft robot moves and the amount of force the soft robot exerts.
If users wish to “freeze” the soft robot’s shape, they can apply moderate heat (64°C, or 147°F), and then let the robot cool briefly. This prevents the soft robot from reverting to its original shape, even after the liquid in the microfluidic channels is pumped out. If users want to return the soft robot to its original shape, they simply apply the heat again after pumping out the liquid, and the robot relaxes to its original configuration.
“A key factor here is fine-tuning the thickness of the shape memory layer relative to the layer that contains the microfluidic channels,” says Yinding Chi, co-lead author of the paper and a former Ph.D. student at NC State. “You need the shape memory layer to be thin enough to bend when the actuator’s pressure is applied, but thick enough to get the soft robot to retain its shape even after the pressure is removed.”
To demonstrate the technique, the researchers created a soft robot “gripper,” capable of picking up small objects. The researchers applied hydraulic pressure, causing the gripper to pinch closed on an object. By applying heat, the researchers were able to fix the gripper in its “closed” position, even after releasing pressure from the hydraulic actuator.

The miniature soft hydraulic actuators can control the deformation and motion of soft robots that are less than a millimeter thick. This photo shows a tendril-like soft robot wrapping around a cylinder and lifting it up. © Jie Yin, NC State University
The gripper could then be moved—transporting the object it held—into a new position. Researchers then applied heat again, causing the gripper to release the object it had picked up.
“Because these soft robots are so thin, we can heat them up to 64C quickly and easily using a small infrared light source—and they also cool very quickly,” says Haitao Qing, co-lead author of the paper and a Ph.D. student at NC State. “So this entire series of operations only takes about two minutes.
“And the movement does not have to be a gripper that pinches,” says Qing. “We’ve also demonstrated a gripper that was inspired by vines in nature. These grippers quickly wrap around an object and clasp it tightly, allowing for a secure grip.

“This paper serves as a proof-of-concept for this new technique, and we’re excited about potential applications for this class of miniature soft actuators in small-scale soft robots, shape-shifting machines, and biomedical engineering.”
The paper, “Fully 3D-Printed Miniature Soft Hydraulic Actuators with Shape Memory Effect for Morphing and Manipulation,” is published in the journal Advanced Materials. The paper was co-authored by Yaoye Hong, a former Ph.D. student at NC State; Yao Zhao and Yanbin Li, postdoctoral researchers at NC State; and Fangjie Qi, a Ph.D. student at NC State.
More information:
Haitao Qing et al, Fully 3D‐Printed Miniature Soft Hydraulic Actuators with Shape Memory Effect for Morphing and Manipulation, Advanced Materials (2024). DOI: 10.1002/adma.202402517
Provided by
North Carolina State University
Citation:
3D-printed mini-actuators can move small soft robots, lock them into new shapes (2024, June 11)

