Scientists at the Max-Planck-Institute for Intelligent Systems (MPI-IS) have developed hexagon-shaped robotic components, called modules, that can be snapped together LEGO-style into high-speed robots that can be rearranged for different capabilities.
The team of researchers from the Robotic Materials Department at MPI-IS, led by Christoph Keplinger, integrated artificial muscles into hexagonal exoskeletons that are embedded with magnets, allowing for quick mechanical and electrical connections.
The team’s work, “Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots” was published in Science Robotics on September 18, 2024.
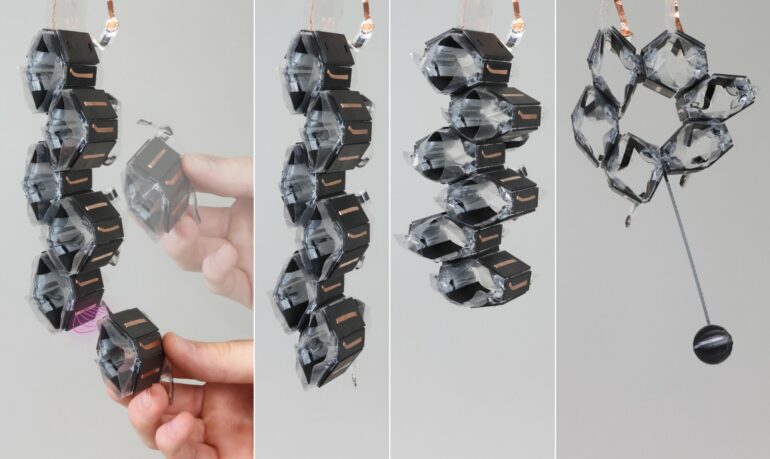
Six lightweight rigid plates made from glass fiber serve as the exoskeleton of each HEXEL module. The inner joints of the hexagons are driven by hydraulically amplified self-healing electrostatic (HASEL) artificial muscles.
Applying a high voltage to the module causes the muscle to activate, rotating the joints of the hexagon and changing its shape from long and narrow to wide and flat.
“Combining soft and rigid components in this way enables high strokes and high speeds. By connecting several modules, we can create new robot geometries and repurpose them for changing needs,” says Ellen Rumley, a visiting researcher from the University of Colorado Boulder.
She and Zachary Yoder, who are both Ph.D. students working in the Robotic Materials Department, are co-first authors of the publication.
In a video, the team shows the many behaviors that can be created with HEXEL modules. A group of modules crawls through a narrow gap, while a single module actuates so fast that it can leap into the air. Multiple modules are connected into larger structures that produce different motions depending on how the modules are attached. For instance, the team combined several modules into a robot which rapidly rolls.

Individual HEXEL modules combine soft artificial muscles with rigid components for fast and large motions. © Zachary Yoder / MPI-IS Ellen Rumley / MPI-IS

HEXEL modules drive a robot which rolls through sand. © Zachary Yoder / MPI-IS Ellen Rumley / MPI-IS

A chain of HEXEL modules with Ellen Rumley left and Zach Yoder right. © MPI-IS / Wolfram Scheible


Fast-moving HEXEL module. © MPI-IS / Wolfram Scheible
“In general, it makes a lot of sense to develop robots with reconfigurable capabilities. It’s a sustainable design option—instead of buying five different robots for five different purposes, we can build many different robots by using the same components. Robots made from reconfigurable modules could be rearranged on demand to provide more versatility than specialized systems, which could be beneficial in resource-limited environments,” Yoder concludes.
More information:
Christoph Keplinger et al, Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots, Science Robotics (2024). DOI: 10.1126/scirobotics.adl3546. www.science.org/doi/10.1126/scirobotics.adl3546
Provided by
Max Planck Society
Citation:
Combining soft artificial muscles with a rigid, magnetic exoskeleton to create building blocks for versatile robots (2024, September 18)

