NASA’s Perseverance Mars rover is trying to cover more distance in a single month than any rover before it—and it’s doing so using artificial intelligence. On the path ahead are sandpits, craters, and fields of sharp rocks that the rover will have to navigate around on its own. At the end of the 3-mile (5-kilometer) journey, which began March 14, 2022, Perseverance will reach an ancient river delta within Jezero Crater, where a lake existed billions of years ago.
This delta is one of the best locations on Mars for the rover to look for signs of past microscopic life. Using a drill on the end of its robotic arm and a complex sample collection system in its belly, Perseverance is collecting rock cores for return to Earth—the first part of the Mars Sample Return campaign.
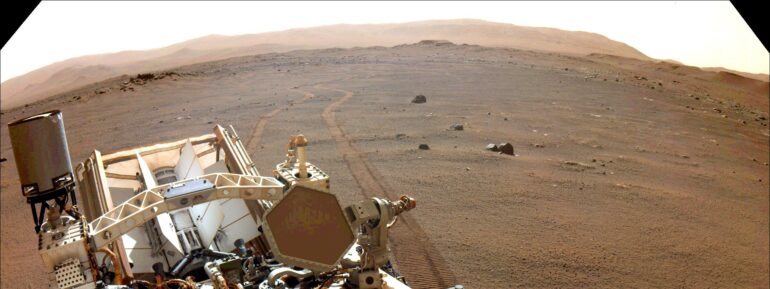
“The delta is so important that we’ve actually decided to minimize science activities and focus on driving to get there more quickly,” said Ken Farley of Caltech, Perseverance’s project scientist. “We’ll be taking lots of images of the delta during that drive. The closer we get, the more impressive those images will be.”
The science team will be searching these images for the rocks they’ll eventually want to study in closer detail using the instruments on Perseverance’s arm. They’ll also hunt for the best routes the rover can take to ascend the 130-foot-high (40-meter-high) delta.
But first, Perseverance needs to get there. The rover will do this by relying on its self-driving AutoNav system, which has already set impressive distance records. While all of NASA’s Mars rovers have had self-driving abilities, Perseverance has the most advanced one yet.
“Self-driving processes that took minutes on a rover like Opportunity happen in less than a second on Perseverance,” said veteran rover planner and flight software developer Mark Maimone of NASA’s Jet Propulsion Laboratory in Southern California, which leads the mission. “Because autonomous driving is now faster, we can cover more ground than if humans programmed every drive.”
How rover planning works
Before the rover rolls, a team of mobility planning experts (Perseverance has 14 who trade off shifts) writes the driving commands the robotic explorer will carry out. The commands reach Mars via NASA’s Deep Space Network, and Perseverance sends back data so the planners can confirm the rover’s progress. Multiple days are required to complete some plans, as with a recent drive that spanned about 1,673 feet (510 meters) and included thousands of individual rover commands.
Some drives require more human input than others. AutoNav is useful for drives over flat terrain with simple potential hazards—for instance, large rocks and slopes—that are easy for the rover to detect and work around.
Thinking while driving
AutoNav reflects an evolution of self-driving tools previously developed for NASA’s Spirit, Opportunity, and Curiosity rovers. What’s different for AutoNav is “thinking while driving”—allowing Perseverance to take and process images while on the move. The rover then navigates based on those images. Is that boulder too close? Will its belly be able to clear that rock? What if the rover wheels were to slip?
Upgraded hardware allows “thinking while driving” to happen. Faster cameras mean Perseverance can take images quickly enough to process its route in real-time. And unlike its predecessors, Perseverance has an additional computer dedicated entirely to image processing. The computer relies on a single-purpose, super-efficient microchip called a field-programmable gate array that is great for computer vision processing.
“On past rovers, autonomy meant slowing down because data had to be processed on a single computer,” Maimone said. “This extra computer is insanely fast compared to what we had in the past, and having it dedicated for driving means you don’t have to share computing resources with over 100 other tasks.”
Of course, humans aren’t completely out of the picture during AutoNav drives. They still plan the basic route using images taken from space by missions like NASA’s Mars Reconnaissance Orbiter. Then, they mark obstacles such as potential sand traps for Perseverance to avoid, drawing “keep out” and “keep in” zones that help it navigate.
Another big difference is Perseverance’s sense of space.

Curiosity’s autonomous navigation program keeps the rover in a safety bubble that is 16 feet (5 meters) wide. If Curiosity spots two rocks that are, say, 15 feet (4.5 meters) apart—a gap it could easily navigate—it will still stop or travel around them rather than risk passing through.
But Perseverance’s bubble is much smaller: A virtual box is centered on each of the rover’s six wheels. Mars’ newest rover has a more sensitive understanding of the terrain and can get around boulders on its own.
“When we first looked at Jezero Crater as a landing site, we were concerned about the dense fields of rocks we saw scattered across the crater floor,” Maimone said. “Now we’re able to skirt or even straddle rocks that we couldn’t have approached before.”
While previous rover missions took a slower pace exploring along their path, AutoNav provides the science team with the ability to zip to the locations they prioritize the most. That means the mission is more focused on its primary objective: finding the samples that scientists will eventually want to return to Earth.
Provided by
Jet Propulsion Laboratory
Citation:
Perseverance rover hightails it to Martian delta (2022, March 18)

