Can a robot mimicking a climbing and walking lizard give new insights into the evolution and advantages of different movements in humans and other animals?
The answer is yes, according to a new international, interdisciplinary studypublished in npj Robotics, co-authored by Dr. Christofer Clemente from the University of the Sunshine Coast.
“These findings may also help us to build faster, more effective legged robots,” said Dr. Clemente, who specializes in the biomechanics of living and extinct animals.
“This might one day be important for climbing over obstacles to find survivors during search and rescue missions.”
“Our research team developed a lizard- inspired robot capable of level running and climbing, and combined biology, robotics and mathematics based on lizard locomotion to understand whether it was better to move with legs or the spine,” Dr. Clemente said.
“We found that if you want to move fast, you should mostly use your legs, and move your spine as little as possible. But using the spine a little bit helps to use less energy.
“We also identified that moving limbs or the spine too much tended to decrease stability during climbing, meaning robots were more likely to fall off the wall.”
Lizards are masters of locomotion
Lead author, Dr. Robert Rockenfeller from the University of Koblenz, said overall they found optimum locomotion required both spine and limb movement, which closely agreed with movement patterns among lizards.
“The findings make it possible to detail the extent of evolutionary trade-offs between three key performance criteria—speed, efficiency and stability—and determine the relative strength of these selection pressures on locomotion,” Dr. Rockenfeller said.
Dr. Clemente said among vertebrates, patterns of movement varied considerably, from the lateral spine-based movements of fish and salamanders to the predominantly limb-based movements of mammals and birds.
“However, lizards use both their limbs and spines, which makes them the perfect species to study to help fill gaps in understanding about why these changes may have occurred,” he said.
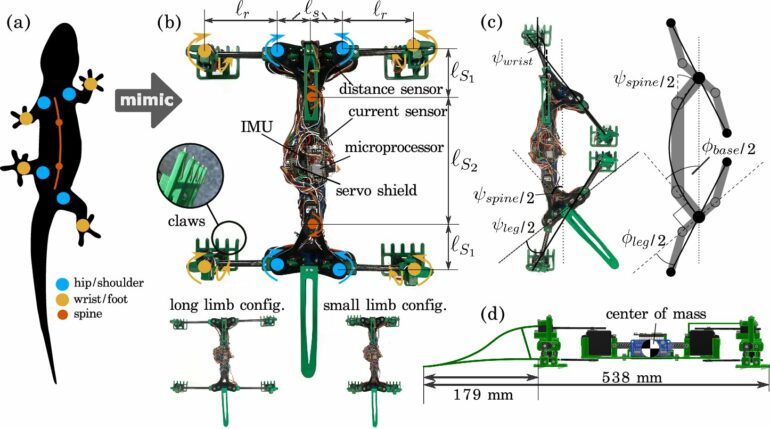
The research team’s lizard-inspired robot was capable of level running and climbing on inclined or vertical surfaces, with modifiable leg lengths and the ability to adjust its spine and limb range of motion and stride speed.
. DOI: 10.1038/s44182-024-00011-2")
Kinematic data collected during climbing and level walking from 44 species with varying body plans using motion tracking of body points which were then used to calculate limb and spine range of motion. © npj Robotics (2024). DOI: 10.1038/s44182-024-00011-2
“We also built a performance landscape to evaluate its climbing efficiency and stability,” Dr. Clemente said.
“This data was mapped with findings from a theoretical two-dimensional model of lizard locomotion as well as measurements of more than 40 species of climbing and running lizards.

“We were able to determine several engineering criteria to consider when developing limbed robotic devices capable of traversing a wide variety of environments.”
“Lateral spine undulation need not be an important consideration if maximizing robotic speed is the primary objective but can be important for reducing energy consumption.”
Similarly, this understanding may also help to design faster and more stable and efficient robotic strides.
More information:
Robert Rockenfeller et al, Coordinating limbs and spine: (Pareto-)optimal locomotion in theory, in vivo, and in robots, npj Robotics (2024). DOI: 10.1038/s44182-024-00011-2
Provided by
University of the Sunshine Coast
Citation:
Bio-inspired lizard robot reveals what’s needed for optimum locomotion (2024, July 22)

