Robotic automation has become a game-changer in addressing labor shortages. While traditional rigid grippers have effectively automated various routine tasks, boosting efficiency and productivity in industries that deal with objects of well-defined specifications, they fall short in sectors like the food industry, where delicate objects of varying sizes and shapes need to be handled. In these cases, a more specialized type of gripper is required.
“Bioinspired soft robotics seeks to develop technologies that draw inspiration from nature and leverage advanced materials and fabrication processes,” said Dr. Pablo Valdivia y Alvarado, Associate Professor at the Singapore University of Technology and Design (SUTD).
Soft grippers inspired by the natural dexterity and control of human hands are particularly well-suited to the food industry. They can adapt to objects of varying sizes and shapes while distributing forces more evenly, making them ideal for handling delicate items.
Various competitions are organized to test and challenge the capabilities of soft grippers in performing real-world tasks. A leading event in this field is the annual IEEE RoboSoft Manipulation Competition, where Associate Professor Valdivia y Alvarado and his team secured the grand prize in both 2022 and 2023.
In their paper “Applications of a vacuum-actuated multi-material hybrid soft gripper: lessons learnt from RoboSoft manipulation challenge” published in Frontiers in Robotics and AI, they share valuable insights and lessons from their participation in these competitions.
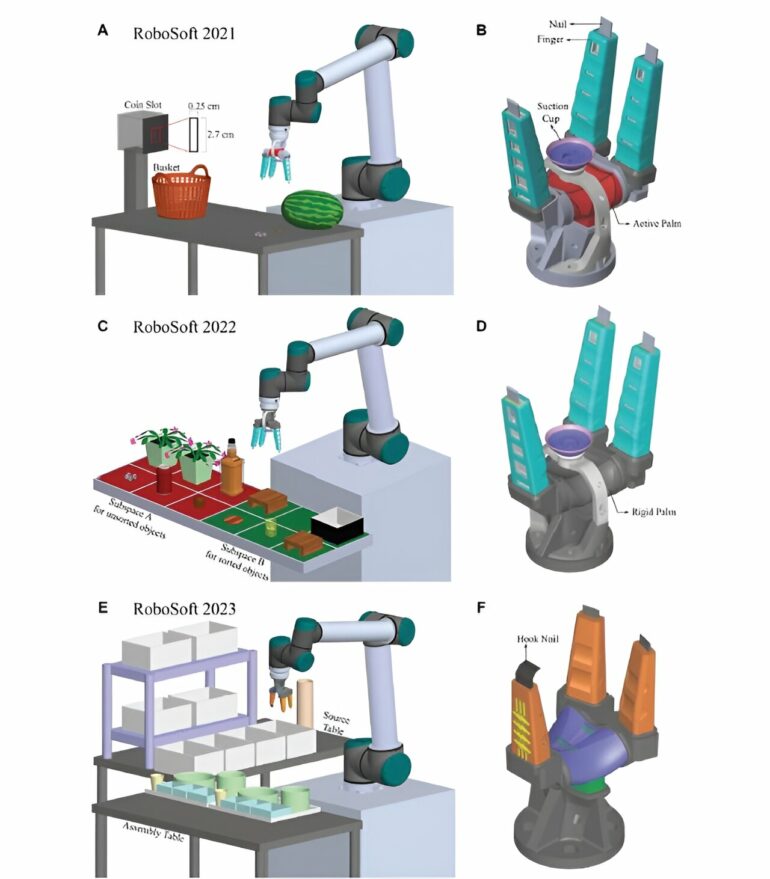
The group’s baseline gripper design was pivotal, providing a solid foundation for subsequent refinements. Given that certain competition details were often disclosed at the last minute, versatility was essential. The team chose a three-finger gripper design, capable of adapting to a wide variety of shapes and grasping modes.
In crafting the prototype, Assoc Prof Valdivia y Alvarado and his group prioritized materials that were durable, resistant to wear and tear, food- and skin-safe, and highly elastic, ensuring the gripper could effortlessly conform to different objects. Rather than using the more common positive pressure-based actuation, the team opted for vacuum actuation to avoid the inherent risk of pressure overload associated with positive pressure systems.
The team’s vacuum-actuated hybrid soft gripper was designed with two key components: soft composite fingers and a palm. The fingers, inspired by human anatomy, featured stiff wedges covered in a soft, thin skin. When activated by vacuum, the skin collapses, causing the fingers to bend and grasp objects. The palm, similarly designed, enhanced the gripper’s weight capacity and control.
This robust baseline design allowed for additional features and capabilities in later iterations. Associate Professor Valdivia y Alvarado highlighted the gripper’s wide grasping potential compared to other soft grippers.
The team further enhanced the design by adding a suction cup to increase payload capacity and a curved nail that functions as a hook. This adaptability to specific competition challenges was crucial to their success in the RoboSoft competitions.
When reflecting on key lessons from the experience, Associate Professor Valdivia y Alvarado emphasized the importance of foresight and versatility.
He stressed the value of opting for simpler, more efficient solutions over complex engineering that may slow down processing time. Additionally, he highlighted the need for a versatile and modular design, allowing for regular updates as competition details emerged. Adaptability was crucial.
The RoboSoft competition scenarios, grounded in real-world applications, demonstrated the potential of the team’s vacuum-actuated hybrid soft gripper for tasks such as food handling, high-mix packaging, waste segregation, and urban farming. With two technology commercialization grants already secured, the team is advancing product development and pilot testing.

This project exemplifies SUTD’s approach of integrating design and technology in research. The gripper, which earned the prestigious Iron A’ Design Award, was designed to accommodate diverse functionalities across various industries.
Associate Professor Valdivia y Alvarado noted that their methodology of incorporating constant industry feedback ensures that research remains relevant, facilitating the transition from lab prototypes to commercial products ready for end users.
More information:
Saikrishna Dontu et al, Applications of a vacuum-actuated multi-material hybrid soft gripper: lessons learnt from RoboSoft manipulation challenge, Frontiers in Robotics and AI (2024). DOI: 10.3389/frobt.2024.1356692
Provided by
Singapore University of Technology and Design
Citation:
Designing the ideal soft gripper for diverse functionalities (2024, August 22)

