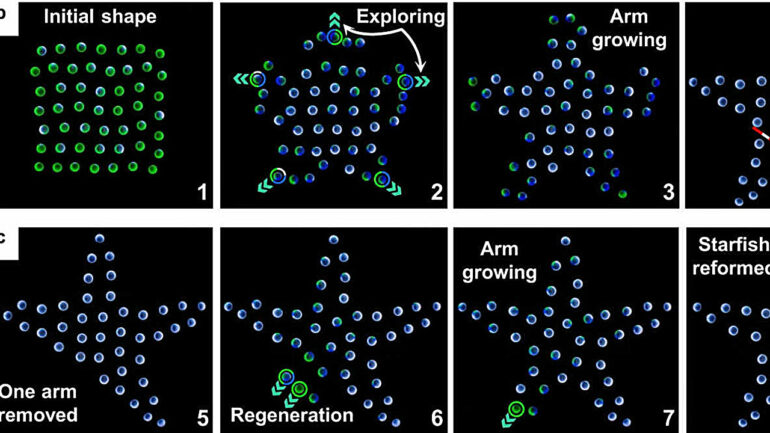
Researchers have proposed a new strategy for the shape assembly of robot swarms based on the idea of mean-shift exploration: When a robot is surrounded by neighboring robots and unoccupied locations, it actively gives up its current location by exploring the highest density of nearby unoccupied locations in the desired shape.
The study, titled, “Mean-shift exploration in shape assembly of robot swarms,” has been published in Nature Communications.
This idea is realized by adapting the mean-shift algorithm, an optimization technique widely used in machine learning for locating the maxima of a density function.
When surrounded by other robots and unoccupied locations, a robot explores the highest density of nearby unoccupied locations in the desired shape as identified by the mean-shift optimization.
The proposed strategy was verified by experiments with swarms of 50 ground robots, which demonstrates its potential to be adapted to generate interesting behaviors including shape regeneration, cooperative cargo transportation, and complex environment exploration.
Dr. Roderich Gross at the University of Sheffield has collaborated on this work with researchers from Westlake University, Beihang University and Tsinghua University.
More information:
Guibin Sun et al, Mean-shift exploration in shape assembly of robot swarms, Nature Communications (2023). DOI: 10.1038/s41467-023-39251-5

Provided by
University of Sheffield
Citation:
Engineers build robot swarm that can assemble and repair its shape in a distributed manner (2024, February 12)

