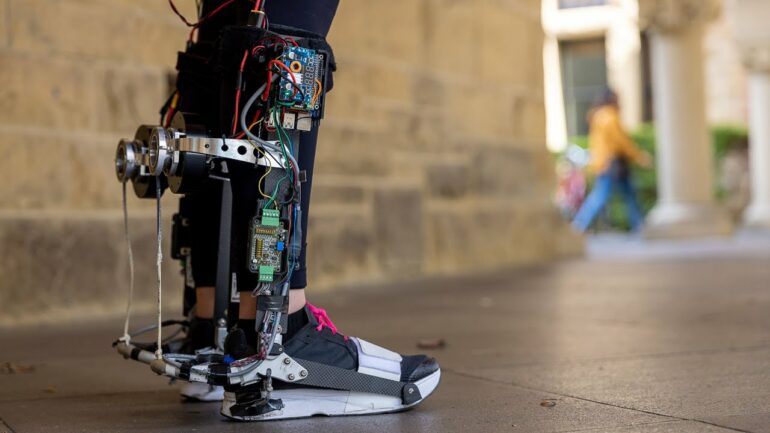
For years, the Stanford Biomechatronics Laboratory has captured imaginations with their exoskeleton emulators—lab-based robotic devices that help wearers walk and run faster, with less effort. Now, these researchers will turn heads out in the “wild” with their first untethered exoskeleton, featured in a paper published Oct. 12 in Nature.
“This exoskeleton personalizes assistance as people walk normally through the real world,” said Steve Collins, associate professor of mechanical engineering who leads the Stanford Biomechatronics Laboratory. “And it resulted in exceptional improvements in walking speed and energy economy.”
This “robotic boot” has a motor that works with calf muscles to give the wearer an extra push with every step. But, unlike other exoskeletons out there, this push is personalized thanks to a machine-learning-based model that was trained through years of work using emulators.
“On a treadmill, our device provides twice the energy savings of previous exoskeletons,” said Patrick Slade, who worked on the exoskeleton as a Ph.D. student and a Wu Tsai Human Performance Alliance Postdoctoral Fellow at Stanford. “In the real world, this translates to significant energy savings and walking speed improvements.”
The ultimate aim is to help people with mobility impairments, particularly older people, move throughout the world as they like. With this latest breakthrough, the research team believes the technology is ready for commercialization in the coming few years.
“The first time you put an exoskeleton on can be a bit of an adjustment,” said Ava Lakmazaheri, a graduate student in the Biomechatronics Laboratory who wore the exoskeleton in tests. “But, honestly, within the first 15 minutes of walking, it starts to feel quite natural. Walking with the exoskeletons quite literally feels like you have an extra spring in your step. It just really makes that next step so much easier.”
Exoskeletons for the real world
The major barrier for an effective exoskeleton in the past was individualization. “Most exoskeletons are designed using a combination of intuition or biomimicry, but people are too complicated and diverse for that to work well,” Collins explained.
To address that problem, this group relied on their exoskeleton emulators—large, immobile, expensive lab setups that can rapidly test how best to assist people and discover the blueprints for effective portable devices to use outside the lab. With students and volunteers hooked up to the emulators, the researchers collected motion and energy expenditure data to understand how the way a person walks with the exoskeleton relates to how much energy they are using.
These data revealed the relative benefits of different kinds of assistance offered by the emulator. It also informed a machine-learning model that the real-world exoskeleton now uses to adapt to each wearer. Unlike the emulator, the untethered exoskeleton can monitor movement using only inexpensive wearable sensors integrated into the boot.
“We measure force and ankle motion through the wearables to provide accurate assistance,” said Slade. “By doing this, we can carefully control the device as people walk and assist them in a safe, unobtrusive way.”
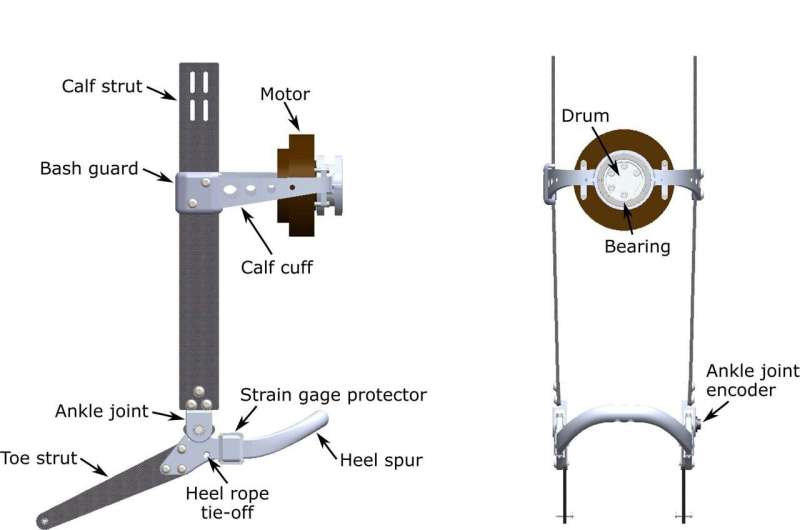
Diagram of untethered exoskeleton electromechanical hardware. These computer-aided design drawings depict the hardware elements of the untethered exoskeleton. The primary components are labelled. An image of the entire device, including textile components, can be found in Fig. 4b. A running shoe (not pictured) is attached to the toe strut with pins that extend from the tip of the toe strut into a carbon fiber plate embedded in the sole of the shoe. The heel of the running shoe is attached to the heel spur by a rope (not pictured) tied into holes on either side of the heel spur and passing through a plastic tube embedded in the sole of the shoe. A Vectran transmission cable (not pictured) transmits force from the drum to the tip of the heel spur. At the top of the calf strut, Velcro straps (not pictured) are connected to the strut through slots. These straps adhere to a separate Velcro strap (not pictured) worn on the shank of the leg, just below the knee. © Nature (2022). DOI: 10.1038/s41586-022-05191-1
A 30-pound boost
The exoskeleton makes walking easier and can increase speed by applying torque at the ankle, replacing some of the function of the calf muscle. As users take a step, just before their toes are about to leave the ground the device helps them push off.
When a person is first using the exoskeleton, it provides a slightly different pattern of assistance each time the person walks. By measuring the resulting motion, the machine learning model determines how to better assist the person the next time they walk. It takes only about one hour of walking for the exoskeleton to customize to a new user.
In tests, the researchers found their exoskeleton exceeded their expectations. According to their calculations, the energy savings and speed boost were equivalent to “taking off a 30-pound backpack.”
“Optimized assistance allowed people to walk 9% faster with 17% less energy expended per distance traveled, compared to walking in normal shoes. These are the largest improvements in the speed and energy of economy walking of any exoskeleton to date,” said Collins. “In direct comparisons on a treadmill, our exoskeleton provides about twice the reduction in effort of previous devices.”

The next step for the exoskeleton is to see what it can do for the target demographic: older adults and people who are beginning to experience mobility decline due to disability. The researchers also plan to design variations that improve balance and reduce joint pain, and to work with commercial partners to turn the device into a product.
“This is the first time we’ve seen an exoskeleton provide energy savings for real-world users,” said Slade. “I believe that over the next decade we’ll see these ideas of personalizing assistance and effective portable exoskeletons help many people overcome mobility challenges or maintain their ability to live active, independent, and meaningful lives.”
“We’ve been working towards this goal for about 20 years, and I’m honestly a little stunned that we were finally able to do it,” said Collins. “I really think this technology is going to help a lot of people.”
More information:
Patrick Slade et al, Personalizing exoskeleton assistance while walking in the real world, Nature (2022). DOI: 10.1038/s41586-022-05191-1
Provided by
Stanford University
Citation:
Exoskeleton walks out into the real world (2022, October 12)

