A lizard-like soft robot that can creep into walls, ductwork, and pipes to perform inspections and three-dimensional mapping tasks that could be dangerous or impossible for humans has been developed by WPI researchers partnered with the City of Worcester.
The team—Cagdas Onal, Paul Mathisen, Yunus Telliel, and Berk Calli—collaborated with students and city officials to design the slender and deformable robot, which can get into tight spaces much less invasively than current methods allow.
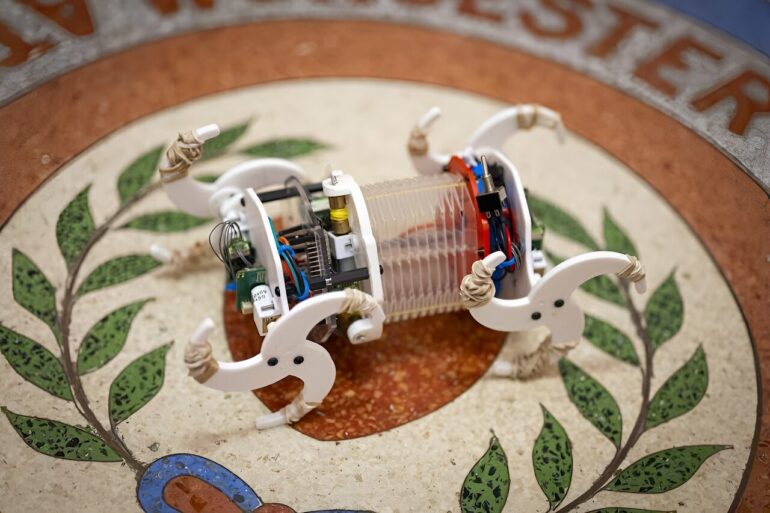
The team built the prototype robot—an “origami” design made of plastic, 3D-printed, and laser-machined parts, custom circuit boards, a miniature computer, sensors, a few metal parts and motors—and tested it in locations across the city that included City Hall and the Worcester Senior Center. Due to its size and shape, the prototype robot was able to maneuver into the nooks and crannies of the aging infrastructure to unobtrusively navigate inside walls, above drop ceilings, and into ductwork.
Designed to accommodate cameras and sensors that can measure temperature and contaminant levels, the robot can operate with a level of autonomy using artificial intelligence and can map the areas it moves through, collecting important data.
The robot’s steering and propulsion systems are separate, and the robot can deform its body—like a lizard—to get into small spaces. Once inside a space, it can travel horizontally and even vertically in narrow spaces. It’s able to navigate maze-like structures without getting stuck, and its modular body structure allows it to use multiple motors to climb over larger steps or gaps, or operate inside pipe networks.

© Matt Burgos/Worcester Polytechnic Institute
If completed and commercialized, the robot could improve worker safety and make cities more sustainable by making it easier to retrofit buildings for climate adaptation.
“Some of these places the robot can get into are not ideal for worker health,” said Telliel, assistant professor of anthropology. “One of our priorities is to design for the safety of people who would be using this robot.”
As the social scientist on the team, Telliel also said that a significant aspect of this project is its potential to present partnerships with the public and civic sector as a driver of innovation in robotics—what he calls “public interest robotics.”
Mathisen, associate professor and director of sustainability, said that for Worcester and a lot of other cities, energy is a major factor when determining the impact of climate change on a population. The robot could be helpful in determining how best to insulate upper areas of buildings, which are susceptible to high heat and energy losses in colder, winter months, and also concentrated heat during summer heat waves, he said.
Calli, assistant professor of robotics engineering, said the robot’s video and three-dimensional mapping capabilities could bridge the gap between what a municipality knows about a building from blueprints and building permits, and what actually exists. Many older buildings lack detailed plans and have likely had modifications done over the years without much documentation.
Matthew Urban, capital projects manager for the city of Worcester, worked with the WPI team as it developed and tested the robot, providing access to tight spaces in old buildings. He said the robot promises to go beyond the limitations of current scoping technology and could prove to be a critical tool used to carefully update historic buildings.
“City Hall is almost 130 years old,” said Urban. “Within the walls, there is plaster, wire mesh, solid masonry, and steel-type construction. Anytime I need to know what’s in this wall, I need to cut a hole. Then I need to see if I can get a camera in there, and it needs to look in the right direction, and maybe it’s not bright enough. Then I need to go cut another hole.”
The process can damage buildings and drain resources from cash-strapped municipalities, said Onal, associate professor of robotics engineering.
“That’s exactly what we’re trying to avoid,” he said.
Onal said the team is developing proposals and continuing its efforts to further refine the design, conduct more testing, and develop a system that supports municipal employees in their efforts to mitigate the impacts of climate change.
Provided by
Worcester Polytechnic Institute
Citation:
Flexible robot that can sneak into small spaces for mapping, inspections (2023, September 20)

