More than 80% of the Earth’s ocean has yet to be mapped. This is due, in part, to the challenges associated with deep-sea exploration, including intense pressure, zero visibility and extremely cold temperatures. As financial and scientific interest in the ocean and its resources increases, researchers are leveraging the adapted features of living fish to create more efficient and practical deep-sea submersibles.
Relatively speaking, only a small number of submersibles have been created that can reach and withstand the lowest point in any ocean, the Challenger Deep. This chasm is estimated to be 35,827 ± 33 feet deep and is located on the southern end of the Mariana Trench, near the island of Guam in the Pacific Ocean. These low production numbers are primarily attributed to the high production and operation costs of deep-sea submersibles.
Submersibles that can withstand ultradeep water pressure have many potential applications, including rescue and salvage operations; installation and maintenance of marine equipment; and underwater archaeology, cinematography and tourism. In order to address the excessive cost and inefficiencies of current submersible design, researchers are adapting locomotion features of living fish species to new deep-sea submersible designs aimed at enhancing navigation, speed, maneuverability and propulsion efficiency while decreasing noise and vibration.
A team of engineers from Westlake University recently published a review on the current state of biomimetic engineering strategies for and challenges facing deep-sea submersible technology in the February 7 at Ocean-Land-Atmosphere Research.
. DOI: 10.34133/olar.0036")
System composition of fish. © Ocean-Land-Atmosphere Research (2023). DOI: 10.34133/olar.0036
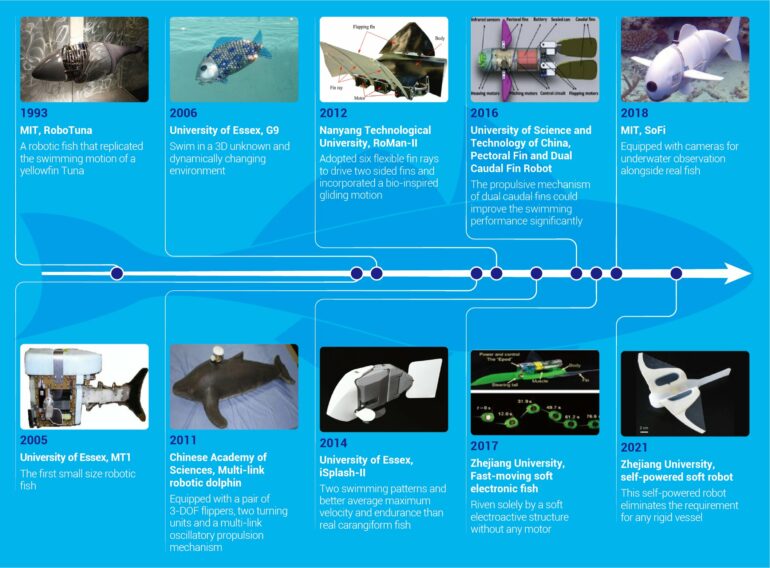
“In this paper, we provide a comprehensive review of the developments in submersible technology from a historical point of view. In particular, we emphasize the emergence of the robotic fish-type submersibles as they represent the future direction of submersible technology,” said Weicheng Cui, professor in the School of Engineering at Westlake University and senior author of the paper.
Early submersibles were designed to explore deep-sea environments using technologies and materials from the mid-twentieth century. The earliest vehicles were characterized by three distinct features: they were manned submersibles that used, ordinary high-strength steel as a pressure hull, and gasoline for buoyancy. The resulting crafts couldn’t propel themselves and were large, heavy and difficult to maneuver.
The incorporation of additional technologies over time that facilitated remote and unmanned operation of submersibles improved functionality, but production and operation costs continued to hinder their widespread use. Instead, submersibles designed today leverage solid buoyancy material, facilitating more compact designs, and ultra-high strength steel and other lightweight metals to lower the weight of the submersible while improving hull strength, maneuverability and manufacturing and operating costs.
“The next generation of submersibles will be the robotic fish-type submersibles which are characterized by the fusion of biomimicry and advanced technologies. However, many key technologies need to be solved in implementing the real robotic fish-type submersible,” said Cui.
. DOI: 10.34133/olar.0036")
Surface and underwater collaborative system. © Ocean-Land-Atmosphere Research (2023). DOI: 10.34133/olar.0036
In contrast to traditional submersibles that require propellers and rudders for movement, biomimetic robotic fish-type submersibles are designed to look like and emulate the locomotion of real fish. Specifically, biomimetic robotic fish-type submersibles oscillate back and forth to improve maneuverability, energy efficiency and noise compared to traditional submersibles. Additionally, vehicles that mimic the natural swimming behavior of fish disturb the surrounding water less than those with propellers.
Many technological hurdles must be overcome before the ideal aquatic robot is produced. For one, biomimetic robots will require sensors and systems that mimic the modular sensory systems of real fish, which will require a great deal of interdisciplinary research in fields such as hydrodynamics, materials and artificial intelligence. Two of the largest challenges currently facing researchers are maintaining the efficiency and adaptive control of submersibles in changing and complex environments.
The research team also outlined the process they used to design and manufacture a biomimetic robotic fish-type submersible for practical use, the Sea Guru I, as most prototypes in the literature are designed only as proof-of-principle models.
“The next step for our group would be to develop the second generation of the ‘Sea-Guru’ series submersible, named ‘Sea Guru II,’ which is designed to work at the same depth but would demonstrate improved performance. Then we may develop the third generation of the ‘Sea Guru’ series, which can work at full ocean depths. Our ultimate goal is to become a leader in the development of submersible technologies in the world,” said Cui.
Other contributors include Jinyu Li, Weikun Li, Qimeng Liu and Bing Luo from the Research Center for Industries of the Future and the Key Laboratory of Coastal Environment and Resources of Zhejiang Province in the School of Engineering at Westlake University in Zhejiang, China.
More information:
Jinyu Li et al, Current Status and Technical Challenges in the Development of Biomimetic Robotic Fish-Type Submersible, Ocean-Land-Atmosphere Research (2023). DOI: 10.34133/olar.0036
Provided by
Ocean-Land-Atmosphere Research (OLAR)
Citation:
Mimicking fish to create the ideal deep-sea submersible (2024, April 15)

