Researchers at the Istituto Italiano di Tecnologia (IIT-Italian Institute of Technology) have demonstrated that under specific conditions, humans can treat robots as co-authors of the results of their actions. The condition that enables this phenomenon is that a robot behaves in a human-like, social manner. Engaging in gaze contact and participating in a common emotional experience, such as watching a movie, are the key.
The study was published in Science Robotics and paves the way for understanding and designing the optimal circumstances for humans and robots to collaborate in the same environment.
The research study has been coordinated by Agnieszka Wykowska, head of IIT’s Social Cognition in Human-Robot Interaction lab in Genova, and a researcher on a project titled “Intentional Stance for Social Attunement,” which addresses the question of when and under what conditions people treat robots as intentional agents.
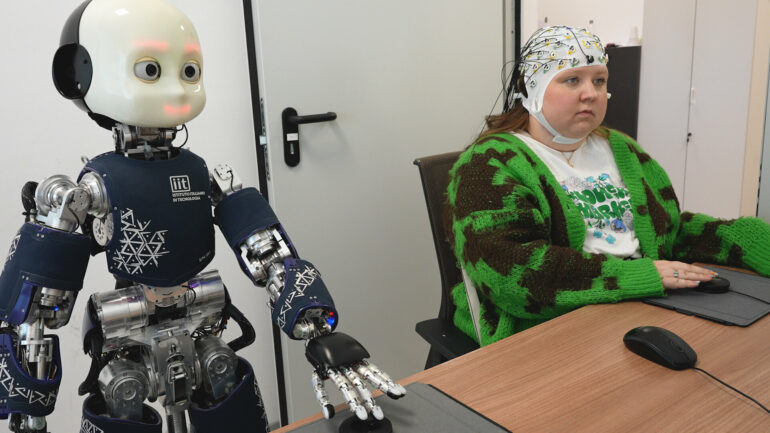
Uma Navare, the first author of the paper and a member of Wykowska’s team, ran the study using behavioral measures and neural responses registered by electroencephalography (EEG), to evaluate the emergence of a shared control mechanism between humans and the humanoid robot iCub.
“As humans, we do not act in a social vacuum and most of our actions require coordination with others in space and time to achieve a goal. A crucial aspect of interacting with others is the experience of what is called the sense of joint agency,” explains Agnieszka Wykowska. “In our research study, we discovered that humans experienced this sense of joint agency with the robot partner when it was presented as an intentional agent, but not when it was presented as a mechanical artifact.”
The sense of joint agency refers to the feeling of control that humans experience both in their own and their partner’s actions, thus underlying team building. IIT researchers investigated it by first identifying its mechanisms in human-human interactions and then testing whether similar responses would occur in human-robot interaction. The interaction task consisted of moving an onscreen cursor to a target location and then confirming the position of the cursor on the target, thereby triggering a tone.
In two experiments, researchers manipulated the attribution of intentionality, that is human-likeness, to the robot iCub. In the first experiment, iCub performed a task mechanically, leading participants to see it as a mechanical artifact. In the second experiment, participants first interacted with iCub in a way that increased the likelihood of attributing intentionality to it. This involved dialogue, gaze exchange and watching videos together, where iCub displayed human-like emotional responses. This aimed to make participants perceive iCub as more intentional and human-like.
Researchers found that only in the second experiment, humans felt jointly a sense of agency with the humanoid robot, evidenced by both behavioral and neuronal responses.
This result shows that proper teamwork with a robot is more likely to occur when the robot is perceived as an intentional and social agent, but not when it is seen as a mechanical device. It informs what the optimal circumstances are for humans and robots to collaborate towards shared goals in daily life.

More information:
Uma Navare et al, When performing actions with robots, attribution of intentionality affects the sense of joint agency, Science Robotics (2024). DOI: 10.1126/scirobotics.adj3665.
Provided by
Italian Institute of Technology
Citation:
New work explores optimal circumstances for reaching a common goal with humanoid robots (2024, June 26)

