Picture this: hundreds of ant-sized robots climb over rubble, under rocks and between debris to inspect the damage of a fallen building before human rescuers explore on-site.
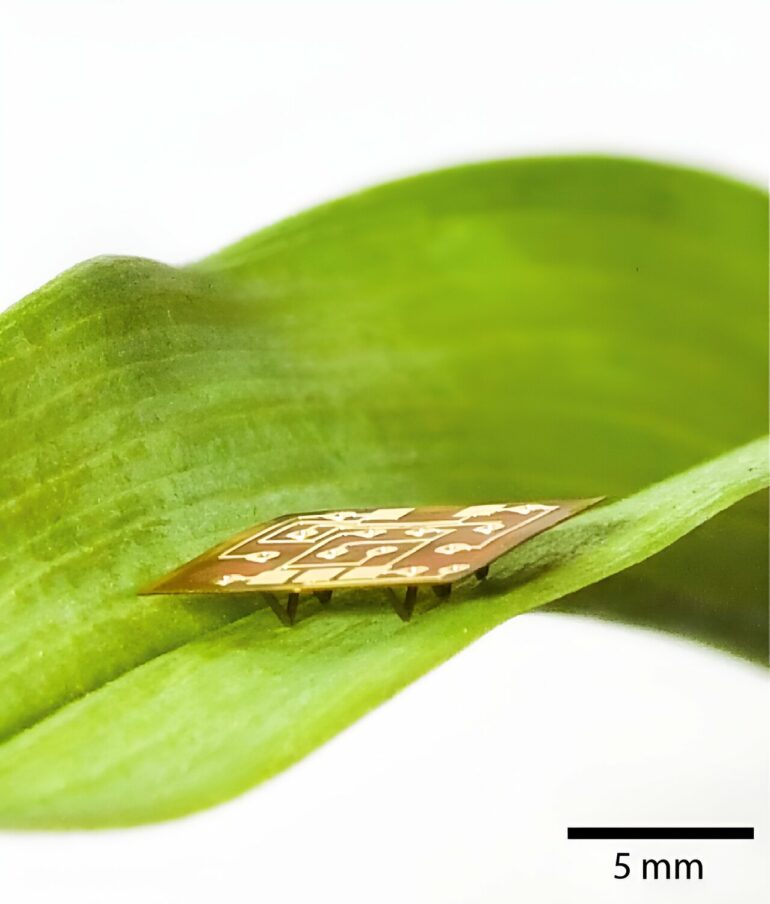
Downscaling legged robots to the size of an insect enables access to small spaces that humans and large robots cannot reach. A swarm of small robots can even collaborate like their insect counterparts to haul objects and protect one another. Picotaur, a new robot from the labs of Sarah Bergbreiter and Aaron Johnson is the first of its size, able to run, turn, push loads and climb miniature stairs.
“This robot has legs that are driven by multiple actuators so it can achieve various locomotion capabilities,” said Sukjun Kim, a recent Ph.D. graduate advised by Bergbreiter. “With multiple gait patterns, it can walk like other hexapod robots, similar to how a cockroach moves, but it can also hop from the ground to overcome obstacles.”
The 7.9 mm robot was 3D-printed using two-photon polymerization, a process previously successful in building various small-scale robotic systems in the lab such as microbots, microgrippers, microswimmers, and microsensors. The work is published in the journal Advanced Intelligent Systems.
“Using this process, we were able to miniaturize the two degree of freedom linkage mechanism that allows Picotaur to clear step heights and easily alternate between walking and jumping,” said Bergbreiter, Professor of Mechanical Engineering.
Kim tested Picotaur’s ability to push loads by creating a miniature soccer field. He found that the robot has enough force to push the ball and then turn, reorient itself, and follow the ball into the net.
“Historically, microfabrication technology was limited in manufacturing microscale devices in two-dimensional spaces, like for the semiconductor industry,” said Kim.
“But now we have this capability to expand the design space from 2D to 3D. We can apply this process to create other small-scale robotic systems for various applications, for example, microgrippers for grasping and delivering small objects for surgical applications and microscale manufacturing applications.”
Because microrobotics is still in early development, there are challenges yet to overcome before we see fully integrated robots in the field. For example, the team hopes to explore adding solar cells to the top of the robot so that it can be powered without tethers.
“Now that we see and accept larger robotic systems in the world, I hope that with this work people can imagine small-scale robots working around us and understand that that future is not too far off,” Kim said. “We can start thinking about where micro-robots would be useful and even find applications we haven’t thought of yet.”

More information:
Sukjun Kim et al, Picotaur: A 15 mg Hexapedal Robot with Electrostatically Driven, 3D‐Printed Legs, Advanced Intelligent Systems (2024). DOI: 10.1002/aisy.202400196
Provided by
Carnegie Mellon University Mechanical Engineering
Citation:
Picotaur—the unrivaled microrobot (2024, August 9)

