Bistable structures in nature are unparalleled for their fast response and force amplification even with the minutest physical stimulation. Harnessing bistability and instability to rapidly release the stored energy in bistable structures could improve robot performance in several areas, e.g., high-speed locomotion, adaptive sensing and fast grasping.
However, current works on bistable structures mainly focus on their stable states, while intermediate states with a large range of tunable energy barriers are missing from current studies.
Recently, a research team led by Dr. Li Yingtian from the Shenzhen Institute of Advanced Technology (SIAT) of the Chinese Academy of Sciences has proposed a type of ultra-tunable bistable structure with programable energy barriers and trigger forces of orders of magnitude differences. The structures can also be customized with varied geometric configurations, dimensions, materials, and actuation methods for various robotic applications.
This work was published in Cell Reports Physical Science on April 18.
The reported bistable structure was fabricated by folding a sheet material to a specific crease pattern. It possesses a stable state, a metastable state, and enormous intermediate states. When the bistable structure transitions from its metastable state to the stable state, there exists a critical point where the stored strain energy reaches its maximum value and the fast snap-through starts.
In this work, the enormous intermediate states with programmable energy barriers before the bistable structure reaches its critical point were reported.
By reshaping the structure from the metastable state to any intermediate state, the energy barrier decreases, meaning that smaller external stimulations are required to trigger the fast snap-through of the bistable structures. As the energy barrier keeps decreasing, the required external stimulation gets more and more delicate. That is how the researchers achieved a large range of adjustable trigger forces for the proposed controllable bistable structure.
To demonstrate the tunability of the proposed structure, the researchers conducted a series of experiments and illustrated that the trigger force of a single structure could be tuned to 0.1% of its maximum value, while the lifted weight difference was 107 times greater using grippers fabricated by the proposed structures with different design parameters.
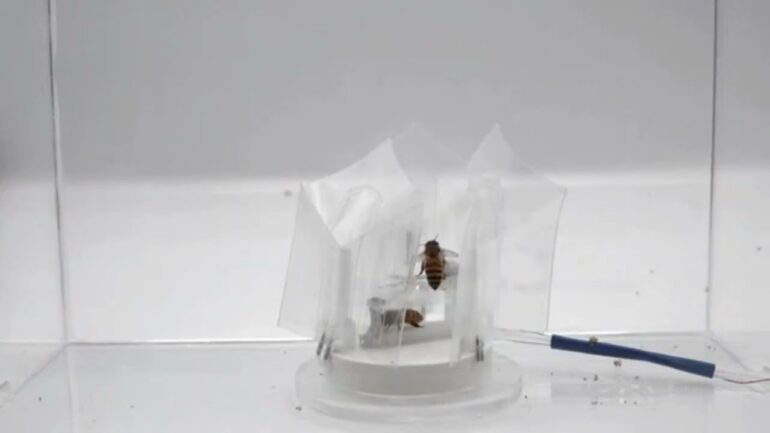
“We can tune the structure to an ultra-sensitive state so that it will respond to a minute stimulation as gentle as a touch of a flying bee, while we could also set the structure to an insensitive state that even a steal ball weighing 110g could not break its energy barrier,” said Dr. LI.
To validate the potentials of the structure in diverse applications, various prototypes were developed, including a robotic flytrap, grippers, a jumper, a swimmer, a thermal switch, and a sorting system. The prototypes demonstrate that the robotic flytrap with a sensitive “pistil” can be triggered by physical stimulation in 10 ms; the bistable catcher can capture a high-speed (10 m/s) table tennis ball; and the minimal jumper reaches a height more than 24 times of its body height, etc.

“We are happy to find out our proposed structure could be used in such a wide range of applications, which demonstrates superior performances,” said Dr. Li. “This work could broaden the frontiers of bistable structure design and lead a way to future designs in robotics, biomedical engineering, architecture, and kinetic art.”
More information:
Yongkang Jiang et al, Ultra-tunable bistable structures for universal robotic applications, Cell Reports Physical Science (2023). DOI: 10.1016/j.xcrp.2023.101365
Provided by
Chinese Academy of Sciences
Citation:
Researchers develop ultra-tunable bistable structures for universal robotic applications (2023, April 24)

