EPFL researchers have developed a method that allows a flapping-wing robot to land autonomously on a horizontal perch using a claw-like mechanism. The innovation could significantly expand the scope of robot-assisted tasks.
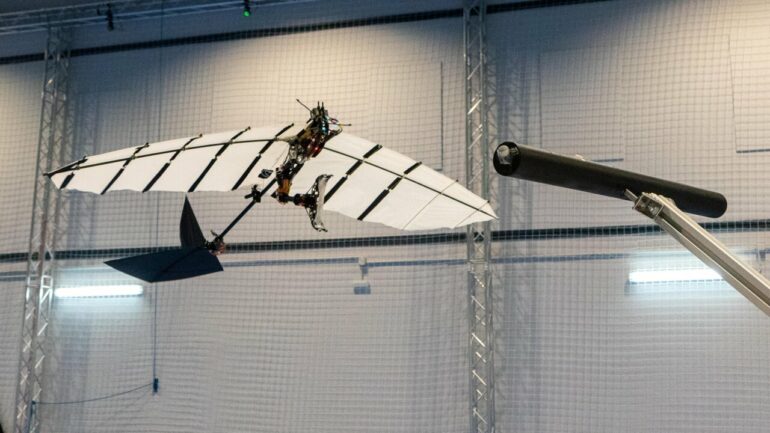
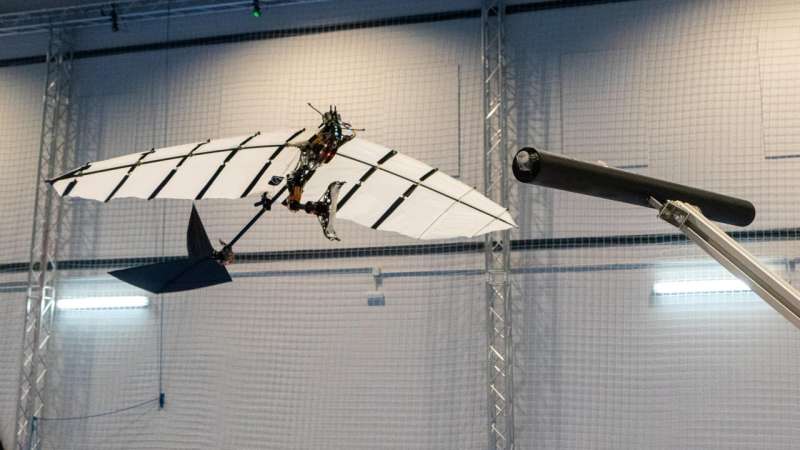
A bird landing on a branch makes the maneuver look like the easiest thing in the world, but in fact, the act of perching involves an extremely delicate balance of timing, high-impact forces, speed, and precision. It’s a move so complex that no flapping-wing robot (ornithopter) has been able to master it, until now.
Raphael Zufferey, a postdoctoral fellow in the Laboratory of Intelligent Systems (LIS) and Biorobotics ab (BioRob) in the School of Engineering, is the first author on a recent Nature Communications paper describing the unique landing gear that makes such perching possible. He built and tested it in collaboration with colleagues at the University of Seville, Spain, where the 700-gram ornithopter itself was developed as part of the European project GRIFFIN.
“This is the first phase of a larger project. Once an ornithopter can master landing autonomously on a tree branch, then it has the potential to carry out specific tasks, such as unobtrusively collecting biological samples or measurements from a tree. Eventually, it could even land on artificial structures, which could open up further areas of application,” Zufferey says.
He adds that the ability to land on a perch could provide a more efficient way for ornithopters—which, like many unmanned aerial vehicles (UAVs) have limited battery life—to recharge using solar energy, potentially making them ideal for long-range missions.
“This is a big step toward using flapping-wing robots, which as of now can really only do free flights, for manipulation tasks and other real-world applications,” he says.
© Raphael Zufferey
Maximizing strength and precision; minimizing weight and speed
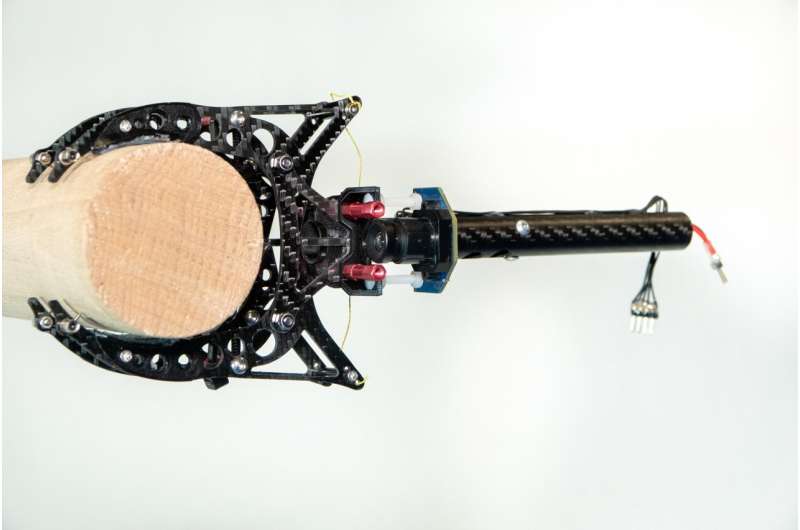
The engineering problems involved in landing an ornithopter on a perch without any external commands required managing many factors that nature has already so perfectly balanced. The ornithopter had to be able to slow down significantly as it perched, while still maintaining flight. The claw needed to be strong enough to grasp the perch and support the weight of the robot, without being so heavy that it could not be held aloft. “That’s one reason we went with a single claw rather than two,” Zufferey notes. Finally, the robot needed to be able to perceive its environment and the perch in front of it in relation to its own position, speed, and trajectory.

© Raphael Zufferey
The researchers achieved all this by equipping the ornithopter with a fully on-board computer and navigation system, which was complemented by an external motion-capture system to help it determine its position. The ornithopter’s leg-claw appendage was finely calibrated to compensate for the up-and-down oscillations of flight as it attempted to hone in on and grasp the perch. The claw itself was designed to absorb the robot’s forward momentum upon impact, and to close quickly and firmly to support its weight. Once perched, the robot remains on the perch without energy expenditure.
Even with all these factors to consider, Zufferey and his colleagues succeeded, ultimately building not just one but two claw-footed ornithopters to replicate their perching results.

© Raphael Zufferey
Looking ahead, Zufferey is already thinking about how their device could be expanded and improved, especially in an outdoor setting.
“At the moment, the flight experiments are carried out indoors, because we need to have a controlled flight zone with precise localization from the motion capture system. In the future, we would like to increase the robot’s autonomy to perform perching and manipulation tasks outdoors in a more unpredictable environment.”
More information:
Raphael Zufferey et al, How ornithopters can perch autonomously on a branch, Nature Communications (2022). DOI: 10.1038/s41467-022-35356-5
Provided by
Ecole Polytechnique Federale de Lausanne
Citation:
Researchers develop winged robot that can land like a bird (2022, December 19)

