To enable the efficient operation of unmanned aerial vehicles (UAVs) in instances where a global localization system (GPS) or an external positioning device (e.g., a laser reflector) is unavailable, researchers must develop techniques that automatically estimate a robot’s pose. If the environment in which a drone operates does not change very often and one is able to build a 3D map of this environment, map-based robot localization techniques can be fairly effective.
Ideally, map-based pose estimation approaches should be efficient, robust and reliable, as they should rapidly send a robot the information it needs to plan its future actions and movements. 3D light detection and ranging (LIDAR) systems are particularly promising map-based localization systems, as they gather a rich pool of 3D information, which drones can then use for localization.
Researchers at Universidad Pablo de Olavide in Spain have recently developed a new framework for map-based localization called direct LIDAR localization (DLL). This approach, presented in a paper pre-published on arXiv, could overcome some of the limitations of other LIDAR localization techniques introduced in the past.
“The main objective of the approach we presented is to build a 3D localization system based on a 3D maps of the environment,” Fernando Caballero, one of the researchers who carried out the study, told TechXplore. “The method is especially designed to work with aerial robots, although it could also be applied to other systems. Map-based localization is essential for many robotics applications, such as monitoring, logistics or inspection working in GPS-denied areas, such as warehouses, urban canyons and indoor environments.”
Most existing state-of-the-art LIDAR techniques utilize the geometric features of objects to align data collected by sensors with a map of the surrounding environment. While these approaches to 3D LIDAR registration have their advantages, they often do not perform well in all scenarios.
DLL, the approach developed by Caballero and his colleague Luis Merino, implements a point cloud to map registration based on the non-linear optimization of the distance between individual points and a map. This means that it does not rely on specific features or point correspondences. Given an initial pose, the framework can track the pose of a robot, simply by refining its predicted pose based on data gathered by motion sensors.
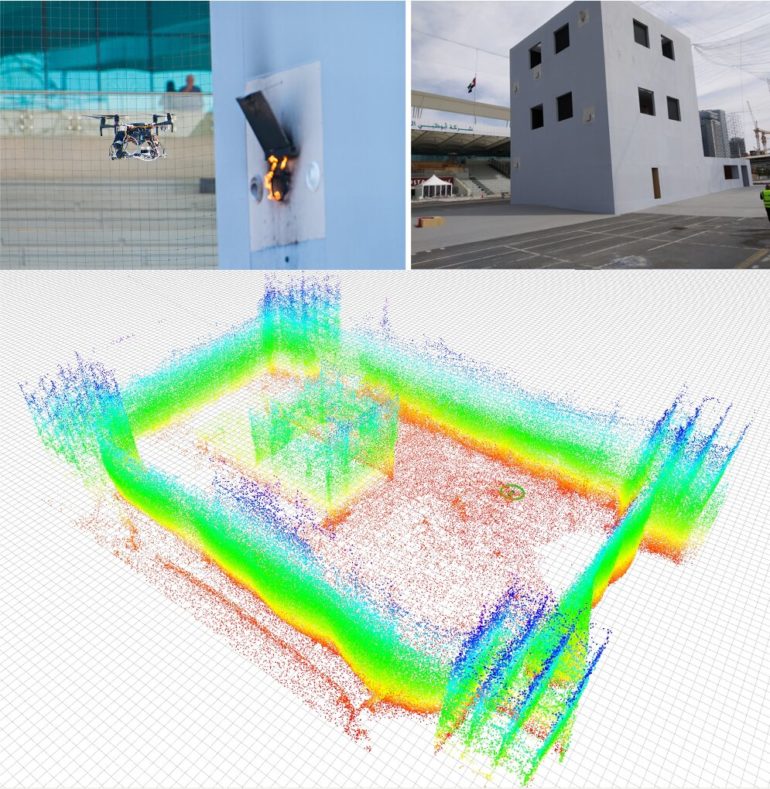
“Assuming that the robot carries a 3D LIDAR that enables sensing of the distance to obstacles in the robot’s vicinity, the objective of DLL is to estimate the position of the robot into a 3D map,” Caballero said. “Based on such information, DLL finds the best alignments of the 3D LIDAR information into the 3D map.”
Caballero and Merino evaluated DLL in a series of trials and compared it to other pose estimation techniques. They found that while its accuracy was similar to that achieved by other state-of-the-art pose estimation methods, DLL is approximately ten times faster than other methods and could thus be used to estimate a robot’s pose in real-time.
“DLL is also robust against noisy odometry (which is very usual in aerial robots) and we demonstrate that it is able to deal with significant errors in robot odometry, with little impact on its overall accuracy,” Caballero said.
DLL is already publicly available and can be accessed by developers worldwide on GitHub. In the future, it could be used to localize aerial robots quickly, accurately, and reliably, particularly in environments where GPS technology does not work.
“We believe that DLL can help to achieve autonomous navigation in areas where GPS signals are not available,” Caballero said. “In our future work, we will consider improving the space efficiency of our method. One of its main drawbacks is the amount of memory required by the 3D map, so we will consider more efficient structures.”

A technique that allows robots to estimate the pose of objects by touching them
More information:
DLL: Direct LIDAR localization. A map-based localization approach for aerial robots. arXiv:2103.06112 [cs.RO]. arxiv.org/abs/2103.06112
2021 Science X Network
Citation:
DLL: A map-based localization framework for aerial robots (2021, April 21)
retrieved 21 April 2021
from https://techxplore.com/news/2021-04-dll-map-based-localization-framework-aerial.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

