Recent advances in the field of robotics have enabled the fabrication of increasingly sophisticated robotic limbs and exoskeletons. Robotic exoskeletons are essentially wearable ‘shells’ made of different robotic parts. Exoskeletons can improve the strength, capabilities and stability of users, helping them to tackle heavy physical tasks with less effort or aiding their rehabilitation after accidents.
So far, most exoskeletons have been created using a model based on a fixed-axis rotating hinge. While this model is simple and fairly effective, it does not reflect the way in which human joints rotate (i.e., in a polycentric way), which can impair or restrict the movements of those wearing them.
In recent years, roboticists have thus been investigating the potential of alternative models for fabricating exoskeletons. One of these techniques entails the use of n-bar linkages to join limb-like components. When carefully implemented, these linkages can effectively replicate specific human motions, as they do not present the inconsistencies associated with monocentric fixed-axis rotating hinge designs.
While n-bar linkages have proven to be very promising tools for replicating the motion of human joints, their excessive use can result in loose and unstable exoskeletal structures. This lack of stability makes the resulting exoskeleton unsuitable for rehabilitating patients with injured or paralyzed limbs.
Researchers at Xi’an Jiaotong University in China have recently introduced a new joint model that could enable the development of more stable and robust exoskeletons. Their model, presented in a paper published in IEEE Access, is inspired by arthropods, a class of invertebrate animals characterized by biological exoskeletons, segmented bodies and paired jointed appendages. Examples of known arthropods are insects (e.g., grasshoppers, ants, bees and dragonflies), arachnids (e.g., spiders and scorpions), myriapods (e.g., centipedes and millipedes), and crustaceans (e.g., crabs, lobsters and shrimp).
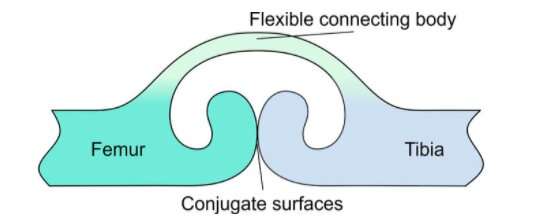
“A common way to realize bionic motion is with an n-bar linkage mechanism within bearings, but the resultant joints can be become complex,” the researchers wrote in their paper. “Herein, we propose a joint model based on the anatomy of grasshopper joints that consists of a pair of conjugate surfaces and a flexible connection body.”
The model devised by the researchers is inspired by the mechanisms underpinning the movements of grasshoppers. A simple anatomical experiment, however, revealed that it also effectively replicates the way in which crabs and lobsters move their limbs, which suggests that it reflects the physical structure of most arthropods.
As part of their study, the researchers used their model to create a prototype joint for exoskeletons. They designed this joint using an optimization algorithm they developed.
Subsequently, they evaluated their prototype joint in a series of experiments in order to verify its performance and its kinematic characteristics. The findings gathered in these experiments confirmed their model’s feasibility for devising bionic robotic systems and its advantageous characteristics.
In the future, the arthropod-inspired joint model created by this team of researchers could be used to build more effective exoskeletons or other robotic structures for a variety of applications, including rehabilitation or the enhancement of human capabilities. In contrast with other exoskeleton design strategies, it could allow humans to move more freely and naturally, while also ensuring that their body is adequately supported.

New invention revolutionizes exoskeletons
More information:
A general arthropod joint model and its applications in modelling human robotic joints. IEEE Access(2021). DOI: 10.1109/ACCESS.2021.3049469.
2021 Science X Network
Citation:
A new bio-inspired joint model to design robotic exoskeletons (2021, February 2)
retrieved 2 February 2021
from https://techxplore.com/news/2021-02-bio-inspired-joint-robotic-exoskeletons.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

