Researchers at Harvard University have recently devised a system based on Wi-Fi sensing that could enhance the collaboration between robots operating in unmapped environments. This system, presented in a paper pre-published on arXiv, can essentially emulate antenna arrays in the air as a robot moves freely in a 2-D or 3-D environment.
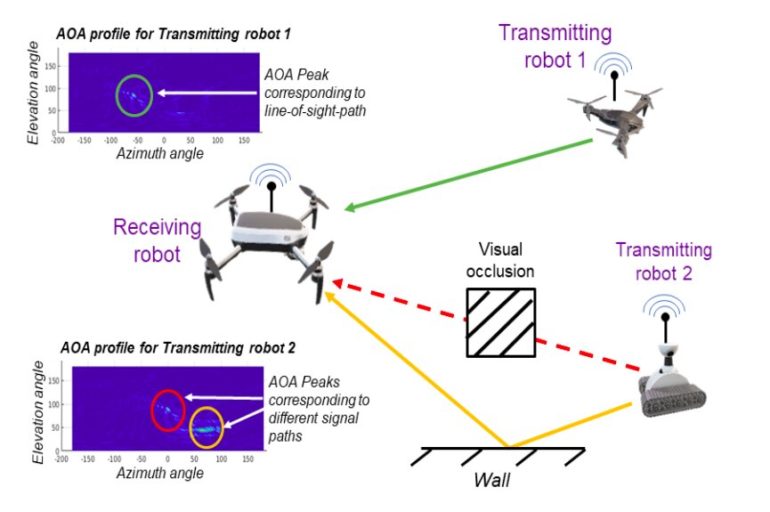
“The main goal of our paper was to leverage arbitrary 3-D trajectories for a robot (UAV or UGV) equipped with an on-board trajectory estimation sensor,” Ninad Jadhav, one of the researchers who carried out the study, told TechXplore. “This allows a Wi-Fi-signal-receiving robot to estimate the spatial direction (in azimuth and elevation) of other neighboring robots by capturing all the wireless signal paths traveling between the transmitting and receiving robot (which we call AOA profile). Additionally, we also characterized how the trajectory shape impacts the AOA profile using Cramer Rao bound.”
In their previous studies, Jadhav and his colleagues focused on robot collaboration scenarios in which the robots followed 2-D trajectories with a limited set of geometries (e.g., linear or curved). The new system they created, on the other hand, is applicable to scenarios where robots are moving freely, following a wider range of trajectories.
“Another constraint that we relaxed in the paper was the requirement for a Wi-Fi signal-transmitting robot to remain stationary while the receiving robot moves and generates an AOA profile,” Jadhav said. “The new approach we devised accounts for continuous mobility of all robots irrespective of whether its transmitting or receiving Wi-Fi packets.”
As Jadhav and his colleagues wanted to devise a system that only used sensors mounted directly on robots, they also examined the impact of local trajectory estimations, which are intrinsically imperfect and prone to errors, on the patterns in which Wi-Fi signals travel between two robots (AOA profiles). The researchers then evaluated the system they developed in a series of experiments using real robots, achieving highly promising results.
“The system we developed essentially captures information of all the Wi-Fi signal paths traveling between a transmitting and receiving robot,” Jadhav explained. “It does so by leveraging the receiving robot’s trajectory to emulate a virtual antenna array, something akin to synthetic aperture radar. By tracing such an ‘antenna array in air,” we can then use direction of arrival (DOA) algorithms based on antenna array theory (e.g., MUSIC or Bartlett) to estimate the direction of the strongest signal path.”
In the system created by Jadhav and his colleagues, a receiving robot first extracts the raw signal phase using Dan Halprin’s CSI toolbox. Subsequently, it combines this raw signal phase with information about its own trajectory (i.e., its X, Y, Z coordinates in 3-D), to emulate a virtual antenna array.
“This allows the system to calculate the change in the signal phase between consecutive elements of the antenna array,” Jadhav said. “Finally, the change in the signal is used by DOA algorithms to obtain the AOA profile.”
The system has a number of advantages. First, it allows robots to estimate the locations of other robots, especially in cluttered or unknown environments, where traditional sensors such as cameras might not be effective tools for monitoring agents. The new system could thus open up new possibilities for improving the coordination of robots in such environments.
“Our system uses 3-D trajectories to maximize the accuracy of the AOA profile as well as accounting for continuous mobility of all robots,” Jadhav said. “The characterization of a trajectory geometry using the Cramer Rao bound, which we call trajectory ‘informativeness,” is one of the critical results of the paper, as it allowed us to theoretically prove that 3-D trajectories indeed perform better than 2-D trajectories.”
The ‘informativeness’ metric used by Jadhav and his colleagues is a valuable tool to test whether the movements that a robot is about to perform can provide a highly accurate AOA profile, and if not, whether something can be done to improve the accuracy of the profile. In the years to come, the new system they developed could be used to enhance robot-robot collaboration in unmapped and chaotic environments.
“A future research direction that we are looking at is how to essentially co-optimize the trajectory and its informativeness,” Jadhav said. “For example, a linear 2-D trajectory could be the most efficient for the robot when executing some task, yet the corresponding spatial direction (inferred from the AOA profile) will likely have a high error. Instead, what we would want is to design an optimal trajectory that makes a trade-off between efficiency while simultaneously reducing error in spatial direction.”

A technique allows robots to determine whether they are able to lift a heavy box
More information:
WSR: A WiFi sensor for collaborative robotics. arXiv:2012.04174 [cs.RO]. arxiv.org/abs/2012.04174
2021 Science X Network
Citation:
WSR: A new Wi-Fi-based system for collaborative robotics (2021, January 19)
retrieved 19 January 2021
from https://techxplore.com/news/2021-01-wsr-wi-fi-based-collaborative-robotics.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

