Researchers at Tohoku University and the Swiss Federal Institute of Technology in Lausanne, with the support of the Human Frontier Science Program, have decoded the flexible motor control mechanisms underlying salamander walking.
Their findings were published in the journal Frontiers in Neurorobotics on July 30, 2021.
Animals with four feet can navigate complex, unpredictable, and unstructured environments. The impressive ability is thanks to their body-limb coordination.
The salamander is an excellent specimen for studying body-limb coordination mechanisms. It is an amphibian that uses four legs and walks by swaying itself from left to right in a motion known as undulation.
Their nervous system is simpler than those of mammals, and they change their walking pattern according to the speed at which they are moving.
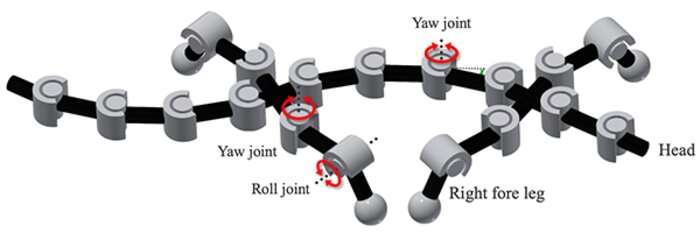
To decode the salamander’s movement, researchers led by Professor Akio Ishiguro of the Research Institute of Electrical Communication at Tohoku University modeled the salamander’s nervous system mathematically and physically simulated the model.
In making the model, the researchers hypothesized that the legs and the body are controlled to support other motions by sharing sensory information. They then reproduced the speed-dependent gait transitions of salamanders through computer simulations.
“We hope this finding provides insights into the essential mechanism behind the adaptive and versatile locomotion of animals,” said Ishiguro.
The researchers are confident their discovery will aid the development of robots that can move with high agility and adaptability by flexibly changing body-limb coordination patterns.
Navigating land and water: How centipedes walk and swim

More information:
Shura Suzuki et al, Spontaneous Gait Transitions of Sprawling Quadruped Locomotion by Sensory-Driven Body–Limb Coordination Mechanisms, Frontiers in Neurorobotics (2021). DOI: 10.3389/fnbot.2021.645731
Citation:
Decoding how salamanders walk (2021, July 30)
retrieved 30 July 2021
from https://techxplore.com/news/2021-07-decoding-salamanders.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

