In recent years, roboticists have created a variety of systems that could eventually operate in real-world environments. As most real-world settings, particularly public spaces, are dynamic and unpredictable, to efficiently navigate these environments robots should be able to gain a good understanding of their surroundings.
Researchers at University of Pennsylvania’s GRASP Laboratory have recently carried out a study investigating how features related to a given environment can enhance a robot’s awareness and its ability to navigate their surroundings. Their paper, pre-published on arXiv, was based on two of their previous research efforts.
The first of these previous studies introduced a series of strategies that used environmental information to enhance a robot’s autonomy in competing a specific task, namely localizing the source of a chemical spill in turbulent flows. As part of the second study, on the other hand, the team introduced new agent-level control policies that leveraged environmental features or noise to maintain a desired spatial distribution of sensing robotic agent in a geophysical flow environment.
“Our previous works focused on Lagrangian coherent structures, an important feature of dynamical systems in many applications such as oceanography and weather prediction, and how they can be used in robotics,” Tahiya Salam, one of the researchers who carried out the study, told TechXplore. “Our new work focuses on how a similar feature, coherent sets, can be learned online and new approaches for how these features can be used in robotic applications, such as crowd monitoring in urban settings and energy-efficient navigation in water.”
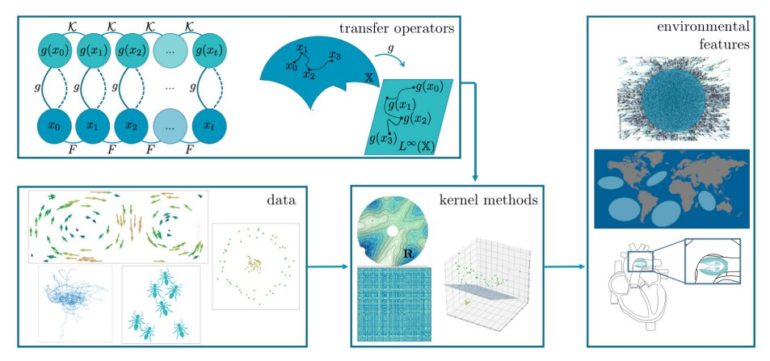
In their new study, Salam and the other researchers at the GRASP Laboratory used a series of techniques that combine global dynamics approaches with machine learning. In this context, the term ‘global dynamics’ refers to the overall dynamics of a given environment and the features characterizing these dynamics.
“The technique we used allowed us to learn global features from data that was collected from the environments robots are operating in,” Salam explained. “The global features, called coherent sets, have interesting properties; namely, they represent regions that disperse very slowly. Using this information about regions dispersing very slowly, robots can leverage these features for decision making.”
Salam and her colleagues computed these so-called ‘coherent sets’ online using machine learning techniques. Subsequently they designed a framework that could control a robot’s behaviors based on the environmental features they computed.
“We found a way to compute coherent sets in real-time without having detailed information about a model that describes the environment,” Salam explained. “In addition, we were able to use these coherent sets in clever ways to achieve smart robot behaviors.”
Salam and her colleagues evaluated the framework they developed in a series of experiments and found that it significantly outperformed offline methods for computing environmental features. The team specifically demonstrated the effectiveness of the model they developed in two scenarios where robots monitored urban environments and navigated on water.
In the future, the framework introduced by this team of researchers could ultimately help to enhance the ability of both existing and emerging robots to navigate unknown and dynamic environments. Meanwhile, Salam plans to further explore the potential of using environmental features to enhance robot navigation.
“In my next studies, I will continue investigating techniques that connect global dynamics and machine learning in more general frameworks,” Salam added. “For example, I would like to represent the global dynamics of arbitrary environments from sensor measurements collected by robots.”
Researchers develop a new robot that can efficiently navigate sidewalks in urban environments
More information:
Tahiya Salam, Victoria Edwards, M. Ani Hsieh, Learning and leveraging environmental features to improve robot awareness. arXiv:2109.06107v1 [cs.RO], arxiv.org/abs/2109.06107
M. Ani Hsieh et al, Small and Adrift with Self-Control: Using the Environment to Improve Autonomy, Robotics Research (2017). DOI: 10.1007/978-3-319-60916-4_22
M. A. Hsieh et al, Distributed allocation of mobile sensing agents in geophysical flows, 2014 American Control Conference(2014). DOI: 10.1109/ACC.2014.6859084
2021 Science X Network
Citation:
How environmental features can enhance robot awareness (2021, October 11)
retrieved 11 October 2021
from https://techxplore.com/news/2021-10-environmental-features-robot-awareness.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

