Inspired by a small and slow snail, scientists have developed a robot protype that may one day scoop up microplastics from the surfaces of oceans, seas and lakes.
The robot’s design is based on the Hawaiian apple snail (Pomacea canaliculate), a common aquarium snail that uses the undulating motion of its foot to drive water surface flow and suck in floating food particles.
Currently, plastic collection devices mostly rely on drag nets or conveyor belts to gather and remove larger plastic debris from water, but they lack the fine scale required for retrieving microplastics. These tiny particles of plastic can be ingested and end up in the tissues of marine animals, thereby entering the food chain where they become a health issue and potentially carcinogenic to humans. Plastic waste makes up 80% of all marine pollution, with 8 to 10 million metric tons of plastic ending up in the ocean each year, according to the United Nations Economic and Social Council.
“We were inspired by how this snail collects food particles at the [water and air] interface to engineer a device that could possibly collect microplastics in the ocean or at a water body’s surface, ” said Sunghwan “Sunny” Jung, professor and director of graduate studies in the Department of Biological and Environmental Engineering in the College of Agriculture and Life Sciences (CALS). Jung is senior author of a study, “Optimal free-surface pumping by an undulating carpet,” which was published online in Nature Communications.
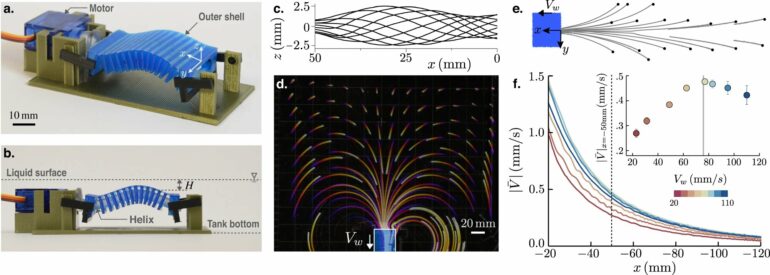
The prototype, modified from an existing design, would need to be scaled up to be practical in a real-world setting. The researchers used a 3D printer to make a flexible carpet-like sheet capable of undulating. A helical structure on the underside of the sheet rotates like a corkscrew to cause the carpet to undulate and create a traveling wave on the water.
Analyzing the motion of the fluid was key to this research.
“We needed to understand the fluid flow to characterize the pumping behavior,” Jung said. The fluid-pumping system based on the snail’s technique is open to the air. The researchers calculated that a similar closed system, where the pump is enclosed and uses a tube to suck in water and particles, would require high energy inputs to operate. On the other hand, the snail-like open system is far more efficient. For example, the prototype, though small, runs on only 5 volts of electricity while still effectively sucking in water, Jung said.
Due to the weight of a battery and motor, the researchers may need to attach a floatation device to the robot to keep it from sinking, Jung said.
Anupam Pandey, a former postdoctoral researcher in Jung’s lab, currently an assistant professor of mechanical engineering at Syracuse University, is the paper’s first author.

More information:
Anupam Pandey et al, Optimal free-surface pumping by an undulating carpet, Nature Communications (2023). DOI: 10.1038/s41467-023-43059-8
Provided by
Cornell University
Citation:
Snail-inspired robot could scoop ocean microplastics (2023, December 4)

