Cambridge engineers have shown how a robotic arm can control the journey of a floating object remotely by manipulating surface waves on the water. Using recent advances in deep reinforcement learning—a field of artificial intelligence (AI) best suited to managing complex decision-making—the team have come up with a way to model the fluid interactions, providing a data-driven approach to solving a complex fluid dynamics problem.
Remote control of floating objects on a fluid surface has numerous applications at small scales (for example in cell manipulation), large scales (for example in the collection of floating debris from small water bodies), and in medical applications (including the transferal of thin tissue sections onto microscope slides for diagnosis). However, the underlying fluid interactions are extremely difficult to model. Their behaviors are governed by a complex interplay of various external factors and internal forces that cannot reliably be mathematically predicted.
By using the precision and repeatability of robotic devices, coupled with deep learning and real-world experimentation in a laboratory setup, the research team from the Department’s Bio-Inspired Robotics Laboratory (BIRL) has been able to address this problem. They developed a control framework that can transport floating objects from one location to the other. The robotic arm learns to control the path taken by the floating object using trial-and-error. An ‘intelligent agent’ taught by reinforcement learning determines the best strategy. The results are published in the journal Scientific Reports.
Fumiya Iida, professor of robotics, said: “What inspired us to begin this research, was witnessing hospital technicians navigating floating biological samples on water during the preparation of microscope slides for cancer diagnosis. This is a very difficult task for today’s robots to do, but through our research project, we have taken a step closer to addressing this by automating what only skilled human technicians can do.”
Dr. Thomas George Thuruthel, research associate in soft robotics sensing and self-healing, said: “Specialist devices are currently used for small scale remote manipulation of floating objects. Typically, they use magnetic or optical signals for remote manipulation. However, this adds constraints on the set-up for example, and the type of materials that can be controlled.
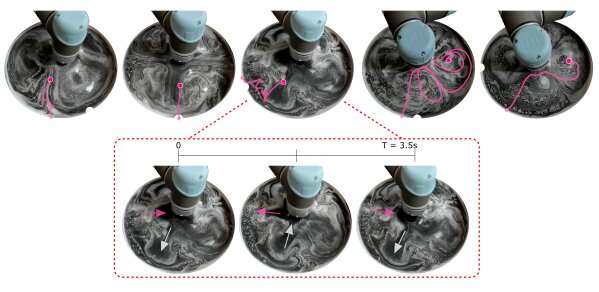
“We present an approach whereby repetitive tasks are performed by a robotic arm without the need for extensive feedback. We use a robotic manipulator to periodically excite the water remotely (similar to a dog paddling to get its tennis ball from the pool), to generate surface flows in order to move objects from any starting location to a specified target location—and tested at a rotation of 0°, 90° and 180°. We found that as the angle and path length increase, the observed trajectory becomes more unpredictable, yet on average, the object can be transported to the desired location.”
David Hardman, research student, said: “We would like to scale-up our set-up by replacing it with ultrasonic or LiDAR sensors (a remote sensing technology). This is possible because the only information required for the reinforcement learning side of things is the starting position of the floating object and the final error from the target. In the future, we would also like to explore its potential application for waste debris and oil spill manipulation. There is, however, a long way to go before this can be tested and validated in these real-world applications.”
More information:
David Hardman et al, Manipulation of free-floating objects using Faraday flows and deep reinforcement learning, Scientific Reports (2022). DOI: 10.1038/s41598-021-04204-9
Provided by
University of Cambridge
Citation:
Remote control of floating objects: Solving a complex fluid dynamics problem with AI (2022, January 28)

