Octopus arms coordinate nearly infinite degrees of freedom to perform complex movements such as reaching, grasping, fetching, crawling, and swimming. How these animals achieve such a wide range of activities remains a source of mystery, amazement, and inspiration. Part of the challenge comes from the intricate organization and biomechanics of the internal muscles.
This problem was tackled in a multidisciplinary project led by Prashant Mehta and Mattia Gazzola, professors of mechanical science & engineering at the University of Illinois Urbana-Champaign. As reported in Proceedings of the Royal Society A, the two researchers and their groups have developed a physiologically accurate model of octopus arm muscles. “Our model, the first of its kind, not only provides insight into the biological problem, but a framework for design and control of soft robots going forward,” Mehta said.
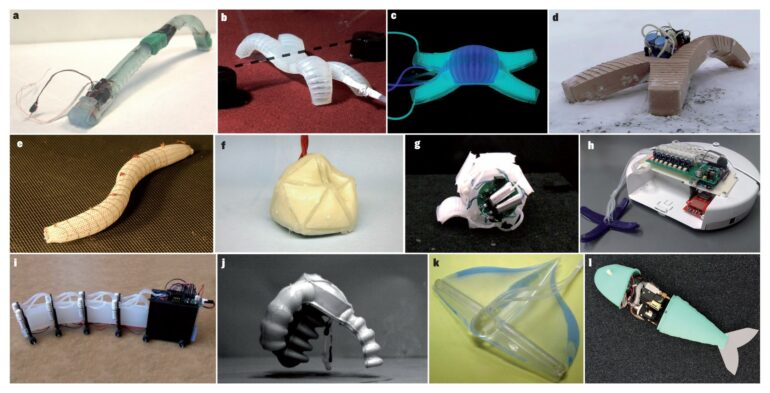
The impressive capabilities of octopus arms have long served as an inspiration for the design and control of soft robots. Such soft robots have the potential to perform complex tasks in unstructured environments while operating safely around humans, with applications ranging from agriculture to surgery.
Graduate student Heng-Sheng Chang, the study’s lead author, explained that soft-bodied systems like octopuses’ arms present a major modeling and control challenge. “They are driven by three major internal muscle groups—longitudinal, transverse, and oblique—that cause the arm to deform in several modes—shearing, extending, bending, and twisting,” he said. “This endows the soft muscular arms with significant freedom, unlike their rigid counterparts.”
The team’s key insight was to express the arm musculature using a stored energy function, a concept borrowed from the theory of continuum mechanics. Postdoctoral scholar and corresponding author Udit Halder explained that “The arm rests at the minimum of an energy landscape. Muscle actuations modify the stored energy function, thus shifting the equilibrium position of the arm and guiding the motion.”
Interpreting the muscles using stored energy dramatically simplifies the arm’s control design. In particular, the study outlines an energy-shaping control methodology to compute the necessary muscle activations for solving manipulation tasks such as reaching and grasping. When this approach was numerically demonstrated in the software environment Elastica, This model led to remarkably life-like motion when an octopus arm was simulated in three dimensions. Moreover, according to Halder, “Our work offers mathematical guarantees of performance that are often lacking in alternative approaches, including machine learning.”
“Our work is part of a larger ecosystem of ongoing collaborations at the University of Illinois,” Mehta said. “Upstream, there are biologists who perform experiments on octopuses. Downstream, there are roboticists who are taking these mathematical ideas and applying them to real soft robots.”
Mehta’s and Gazzola’s groups collaborated with Rhanor Gillette, Illinois Professor Emeritus of molecular and integrative physiology, to incorporate observed octopus physiology into their mathematical model for this study. Future work will discuss the biological implications of energy-based control. In addition, the researchers are collaborating with Girish Krishnan, an Illinois professor of industrial & enterprise systems engineering, to incorporate their mathematical ideas into real soft robot design and control. This will not only create a systematic way of controlling soft robots, but will also provide a deeper understanding of their working mechanisms.
This work was part of the CyberOctopus project, a multidisciplinary university research initiative in the University of Illinois’ Coordinated Science Laboratory supported by the Office of Naval Research.

More information:
Heng-Sheng Chang et al, Energy-shaping control of a muscular octopus arm moving in three dimensions, Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences (2023). DOI: 10.1098/rspa.2022.0593
Provided by
University of Illinois Grainger College of Engineering
Citation:
Reaching like an octopus: A biology-inspired model opens the door to soft robot control (2023, February 24)

