Brain-machine interfaces are devices that enable direct communication between a brain’s electrical activity and an external device such as a computer or a robotic limb that allows people to control machines using their thoughts.
Although this technology is still largely experimental, it holds great promise for people with a spinal cord injury or an amputation. Through electrophysiological signals transmitted between the brain’s neurons and the external source, turning thoughts into actions could help them regain control and sensation of their limbs.
However, restoring motor control and sensation from an assistive device in a natural way remains a scientific “holy grail” due to the complexity of the problem such as fully understanding and restoring the myriad of distinctly different sensations of touch for object friction, moisture, temperature, pain, among others.
Furthermore, the cumulative effect of losing grip, pressure and other sensations makes prosthetic hands not only difficult to control but also feeling like unnatural extensions of the body with limited capacity for human interaction.
A major challenge for conveying tactile sensations through neural interfaces is the mapping from the tactile sensor to the electrical stimulation parameters. There also remains much to learn in the field of neuro-prosthetics because regulatory, ethical and financial constraints continue to be considerable challenges for experimentation in vivo.
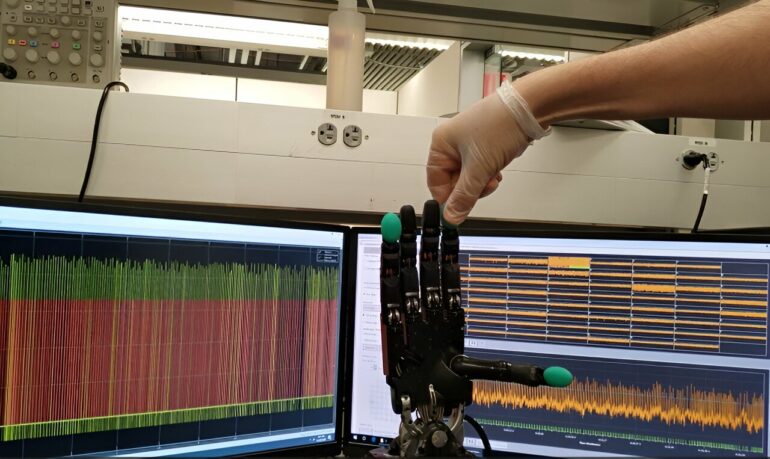
Researchers from Florida Atlantic University’s College of Engineering and Computer Science, in collaboration with FAU’s Charles E. Schmidt College of Science and College of Medicine, and the University of Utah, have developed a novel biohybrid neuro-prosthetic research platform comprised of a dexterous artificial hand electrically interfaced with biological neural networks.
Results of the study, published in the journal Biomimetics, demonstrate that the robotic and neuronal behavior of this biohybrid neuro-prosthetic hand model is sensitive to different neural stimulation encoding methods and can integrate robotic tactile sensations within the motor control of an artificial hand.
This finding opens the possibility of using biohybrid research platforms in the future to study aspects of neural interfaces with minimal human risk. Ultimately, this could lead to a better understanding of the complex sensation of touch, which is necessary for refined control of the hand.
“Very few limb-absent individuals have used bidirectional neuro-prosthetic hands to date. Moreover, research efforts to explore the impact of different electrical stimulation encoding methods for tactile feedback on motor control are few, which poses a bottleneck to research progress in this field,” said Erik Engeberg, Ph.D., senior author and a professor in FAU’s Department of Ocean and Mechanical Engineering.
“Our biohybrid artificial hand model could be useful in studying optimal ways to enable the dexterous control of artificial hands.”
Researchers used the biohybrid model to investigate how cortical neurons could perceive robotic sensations of touch using a pre-clinical research platform. They used tactile sensations from the robotic fingertip to biomimetically stimulate the neurons in the multichannel microelectrode array with a rapidly adapting or slowly adapting encoding model. The evoked neuronal activity recorded from the efferent electrode was decoded to control the robotic hand.
Findings showed that the biological neural networks exhibited the capacity for functional specialization with the rapidly adapting or slowly adapting patterns, represented by significantly different robotic behavior of the biohybrid hand with respect to the tactile encoding method.
Moreover, the convolutional neural network was able to distinguish between rapidly adapting or slowly adapting encoding methods with nearly 98% accuracy when the biological neural networks was provided tactile feedback, averaged across three days in vitro.
“The tradeoffs of these new algorithms could be directly compared systematically in a controlled way that is difficult to assess with human subjects, enabling the capability for identifying superior algorithms prior to human experimentation,” said Engeberg.
This biohybrid hand model could provide a physical testbed to evaluate the interaction between myriad sensory encoding and motor decoding algorithms. Furthermore, the unique testbed could allow new bioinspired control algorithms to be implemented and evaluated.
“There is significant value in developing realistic pre-clinical models of neural interfaces, which could reduce risks to human subjects, lower costs required to conduct research, democratize access to perform neuro-prosthetic research and diminish the burden of complying with regulatory requirements,” said Stella Batalama, Ph.D., dean, FAU College of Engineering and Computer Science.
“Overcoming the hurdles to achieve this goal could profoundly impact millions of people with disabilities around the world.”
More information:
Craig Ades et al, Biohybrid Robotic Hand to Investigate Tactile Encoding and Sensorimotor Integration, Biomimetics (2024). DOI: 10.3390/biomimetics9020078
Provided by
Florida Atlantic University
Citation:
Biohybrid robotic hand may help unravel complex sensation of touch (2024, May 15)

