For the first time ever, researchers at the Surgical Robotics Laboratory of the University of Twente successfully made two microrobots work together to pick up, move and assemble passive objects in 3D environments. This achievement opens new horizons for promising biomedical applications.
Imagine you need surgery somewhere inside your body. However, the part that needs surgery is very difficult for a surgeon to reach. In the future, a couple of robots smaller than a grain of salt might go into your body and perform the surgery. These microrobots could work together to perform all kinds of complex tasks. “It’s almost like magic,” says Franco Piñan Basualdo, corresponding author of the publication.
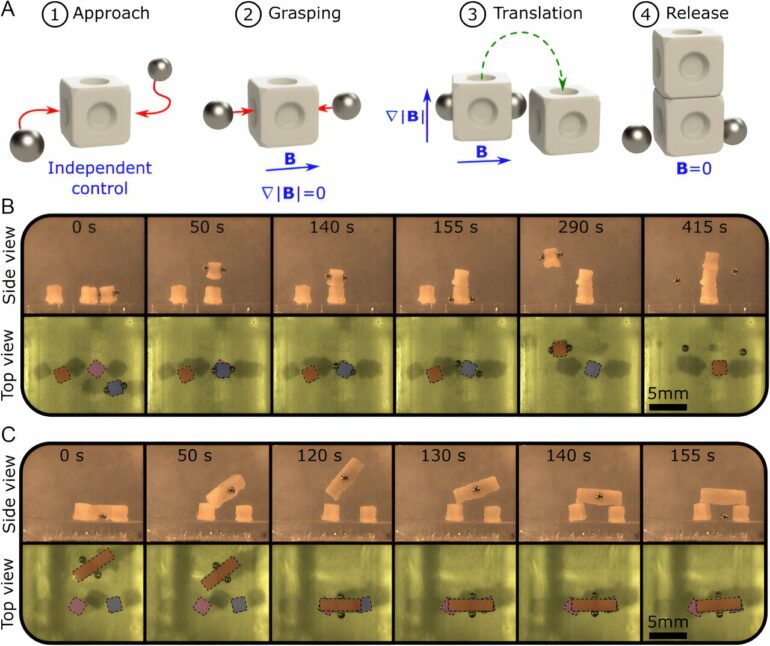
Researchers from the University of Twente successfully exploited two of these 1-millimeter-sized magnetic microrobots to perform several operations. Like clockwork, the microrobots were able to pick up, move and assemble cubes. Unique to this achievement is the 3D environment in which the robots performed their tasks.
Achieving this was quite a challenge. Just like regular magnets stick together when they get too close, these tiny magnetic robots behave similarly. This means they have a limit to how close they can get before they start sticking together. But the researchers at the Surgical Robotics Laboratory found a way to use this natural attraction to their advantage. With a custom-made controller, the team could move the individual robots and make them interact with each other.
The microrobots are biocompatible and can be controlled in difficult-to-reach and even enclosed environments. This makes the technology promising for biomedical studies and applications. “We can remotely manipulate biomedical samples without contaminating them. This could improve existing procedures and open the door to new ones,” says Piñan Basualdo.
Piñan Basualdo is a postdoctoral researcher at the Surgical Robotics Laboratory. His research interests include micro-robotics, non-contact control, swarm robotics, active matter, microfluidics, and interfacial phenomena.
This research was performed at the Surgical Robotics Laboratory. Prof. Sarthak Misra, head of the lab, focuses on developing innovative solutions for a broad range of clinically relevant challenges, including biomedical imaging, automation of medical procedures, and the development of microrobotic tools.
The research was performed in the framework of the European RĔGO project (Horizon Europe program), which aims to develop an innovative set of AI-powered, microsized, untethered, stimuli-responsive swarms of robots. The findings were published in a paper titled “Collaborative Magnetic Agents for 3D Microrobotic Grasping,” in the journal Advanced Intelligent Systems.

More information:
Franco N. Piñan Basualdo et al, Collaborative Magnetic Agents for 3D Microrobotic Grasping, Advanced Intelligent Systems (2023). DOI: 10.1002/aisy.202300365
Provided by
University of Twente
Citation:
Researchers create magnetic microrobots that work together to assemble objects in 3D environments (2023, October 24)

