More than five million people in the United States live with some form of paralysis and may encounter difficulties completing everyday tasks, like grabbing a glass of water or putting on clothes. New research from Carnegie Mellon University’s Robotics Institute (RI) aims to increase autonomy for individuals with such motor impairments by introducing a head-worn device that will help them control a mobile manipulator.
Teleoperated mobile manipulators can aid individuals in completing daily activities, but many existing technologies like hand-operated joysticks or web interfaces require a user to have substantial fine motor skills to effectively control them.
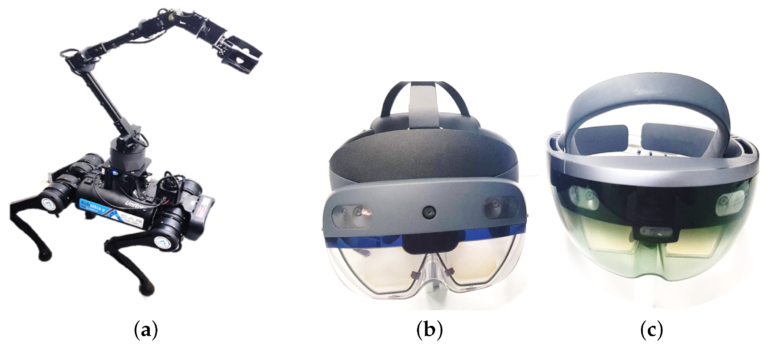
Research led by robotics Ph.D. student Akhil Padmanabha offers a new device equipped with a hands-free microphone and head-worn sensor that allows users to control a mobile robot via head motion and speech recognition. Head-Worn Assistive Teleoperation (HAT) requires fewer fine motor skills than other interfaces, offering an alternative for users who face constraints with technology currently on the market.
In addition to Padmanabha, the research team includes Qin Wang, Daphne Han, Jashkumar Diyora, Kriti Kacker, Hamza Khalid, Liang-Jung Chen, Carmel Majidi and Zackory Erickson. In a human study, participants both with and without motor impairments performed multiple household and self-care tasks with low error rates, minimal effort and a high perceived ease of use.
The research team will present their paper, “HAT: Head-Worn Assistive Teleoperation of Mobile Manipulators,” at the IEEE’s International Conference on Robotics and Automation in London this spring.
The findings are published on the arXiv preprint server.
More information:
Akhil Padmanabha et al, HAT: Head-Worn Assistive Teleoperation of Mobile Manipulators, arXiv (2022). DOI: 10.48550/arxiv.2209.13097
Conference: www.icra2023.org/

Provided by
Carnegie Mellon University
Citation:
Researchers develop head-worn device to control mobile manipulators (2023, March 20)

