Swarm robotics is a relatively new and highly promising research field, which entails the development of multi-robot teams that can move and complete tasks together. Robot swarms could have numerous valuable applications. For instance, they could support humans during search and rescue missions or allow them to monitor geographical areas that are difficult to access.
Researchers at Fraunhofer FKIE and University of Bonn in Germany have recently devised a theoretical construct that could guide the development of self-organizing human-swarm systems. This construct, presented in a paper published in Sage’s Adaptive Behavior journal, provides a new holistic perspective to human-swarm interaction, which the team refers to as “joint human-swarm loops.”
“We focus on the subfield of robotics that investigates human-swarm interaction,” Jonas D. Hasbach, one of the researchers who carried out the study, told TechXplore. “So far, there exists no general perspective on how we could best design future human-swarm interactions. The aim of our article was to provide the research community with a theoretical base, a way of thinking, that can relate isolated solutions in human-swarm interaction.”
When researchers are trying to design “loops” for human-swarm interactions that perform well in real-world settings, they should ideally consider these interactions in their totality. For instance, specifying how humans may signal their intent to a robot swarm is not enough and approaches should also consider how the robot swarm can offer feedback to human users.
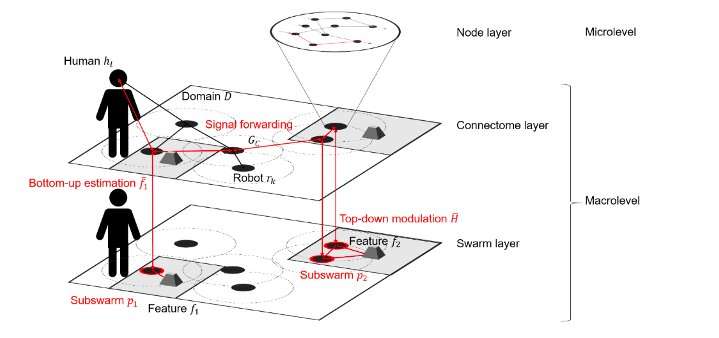
“We asked from a theoretical point of view how we could join the benefits of human cognition with the benefits of self-organizing robot swarms in the context of a complex world,” Hasbach said. “This led to a bio-inspired metaphor for design, the swarm-amplified human, which essentially proposes that the swarm should self-organize itself into and act like human body parts. We hypothesize that this view may be a good metaphor for designing human-swarm loops that are capable of dealing with real-world dynamics.”
In situations where a robot swarm acts as an extension of humans (i.e., helping humans to complete a task by covering areas they cannot cover), the design metaphor introduced by this team of researchers could be used to navigate the complex design space of human-swarm interactions. This could lead to the development of human-swarm systems that are more efficient and can be applied in more complex scenarios.
“For example, we can ask how real body part control feels like and map this onto the human-swarm interface design,” Hasbach explained. “How often have you consciously thought about your leg movement when walking down the street? Probably not that often. This makes sense from an evolutionary perspective; stereotypical body control is taken care of by neural subsystems so that the conscious cognitive system can deal with more complex world dynamics.”
The paper by Hasbach and his colleagues highlights the potential benefits of using human state classification as a control input fed to a robot swarm, rather than having a human user controlling the swarm at all times. The design metaphor introduced by the researchers could also serve as an inspiration for the development of what is sometimes referred to as “swarm cognition.” This is the idea that biological swarms (e.g., ants, bird folks) and the brain share similar self-organizing principles that lead to cognition and decision making.
The idea of “swarm cognition” has not yet been explored in the context of engineering. The researchers’ work could open interesting possibilities for the for the development of robot swarms inspired both by the brain and biological swarms.
“Designing robot swarms that are an extension of the human body relates to integrating neural logic into robot swarms on the network level, which has received only limited attention so far,” Hasbach said. “We have proposed some ideas on how robot swarms could be thought of as neural systems.”
In the future, the theoretical approach devised by this team of researchers could inspire the development of new systems that enable effective interactions between humans and swarms of robots. In their paper, Hasbach and his colleagues also presented the results of an interesting experiment that showed how a robot swarm could be considered as a self-organized interface in and of itself.
“So far, our concepts are of purely theoretical nature, but we are currently implementing prototypes so that we can empirically investigate the swarm-amplified human,” Hasbach said. “The empirical data will be used to update the swarm-amplified human as a scientific theory on how to design human-swarm interaction.”

Less communication among robots allows them to make better decisions
More information:
The design of self-organizing human-swarm intelligence. Adaptive Behavior(2021). DOI: 10.1177/10597123211017550
2021 Science X Network
Citation:
A theoretical approach for designing a self-organizing human-swarm system (2021, August 5)
retrieved 6 August 2021
from https://techxplore.com/news/2021-08-theoretical-approach-self-organizing-human-swarm.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

