Researchers from Tokyo Metropolitan University have developed a new calibration algorithm for technology that turns common materials into touch sensors. HumTouch detects the current that runs from our fingertips to any partially conductive surface and locates where it was touched. The new algorithm speeds up calibration for new users, solving a major drawback of existing versions of the technology. It also improves the accuracy, bringing HumTouch a step closer to practical applications.
In the span of a few decades, touch sensing has gone from being bleeding edge tech to becoming an ubiquitous part of everyday life. This is particularly apparent in the profusion of touchscreens that surround us, from smartphones and tablets to everyday interactive tasks like checking out groceries, making a payment, controlling household appliances or even playing games.
But the sensing capabilities of a touchscreen are confined to the area of the screen. Capacitive touchscreens, for example, feature a set of tiny circuits all over the screen which detect small, local changes in capacitance when we touch it; the point is, there’s a static, preinstalled set of circuitry over which the screen can act as a sensor.
A team of researchers from Tokyo Metropolitan University led by Associate Professor Shogo Okamoto have been working on technology that might turn any slightly conductive surface into a touch sensor. By wiring electrodes to the edges of any surface, whether it be made of cloth, wood or stone, they have developed sensing technology that can not only detect when the surface has been touched, but where it has been touched, just like a touchscreen. The research is published in the ROBOMECH Journal.
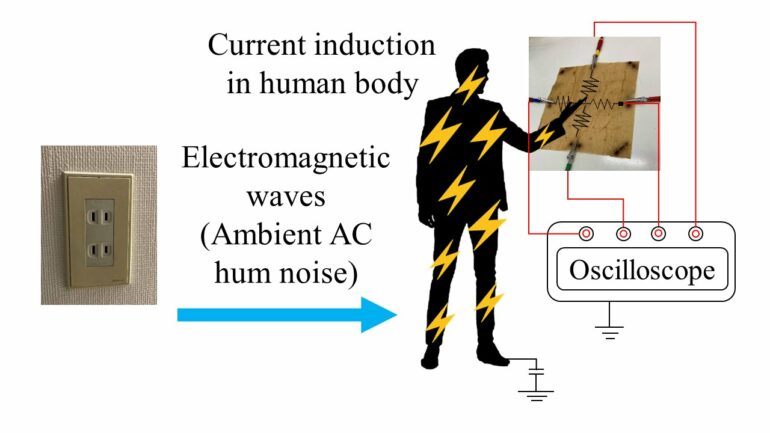
The principle they use is based on AC hum noise. Any location with a mains power supply is full of electromagnetic waves emitted from sources; these induce tiny currents in our body which can leak into a surface when we touch them. The technology, called HumTouch, can convert accurate measurements of this current to a location. This could potentially turn nearly any surface into a touch sensor.
A major drawback of HumTouch, however, has been how sensitive the conversion is to the person. A lengthy calibration process is required for new users, requiring touching the surface at more than 20 locations before accurate touch location could be achieved. Now, the team have discovered that data collected from multiple users could be combined with data from a single touch from a new user to generate much more accurate location than before for the newcomer.
They tested their new algorithm by wiring up a paper towel and collecting data from different users. Any new user could then touch the paper once, have the measurement mixed with preexisting calibration data from other users, and enjoy accurate location of subsequent touches up to an accuracy of less than a centimeter. Importantly, that is less than the width of a finger. In principle, the technology is very close to deployment in practical applications.
The team hopes that HumTouch will be able to bring currently inanimate, offline objects into the network infrastructure of the Internet of Things, adding unprecedented interactive capabilities to our immediate environment.

More information:
Tzu-Hsuan Hsia et al, One-touch calibration of hum-noise-based touch sensor for unknown users utilizing models trained by different users, ROBOMECH Journal (2022). DOI: 10.1186/s40648-022-00238-4
Provided by
Tokyo Metropolitan University
Citation:
Tech that turns household surfaces into touch sensors is a touch closer to application (2023, February 6)

