Nature is one of the greatest sources of inspiration for engineers and computer scientists developing new technological tools. Over the past decade or so, roboticists have developed countless robots inspired by the behavior and biological mechanisms of snakes, fish, cheetahs, birds, insects and countless other animals.
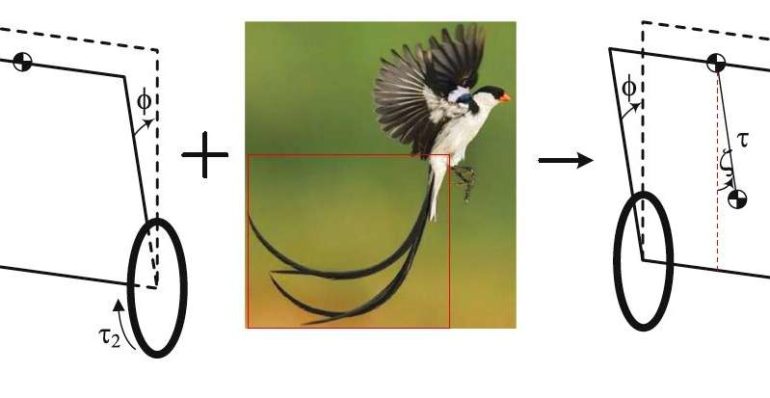
Researchers at Beijing Institute of Technology recently designed a new bio-inspired robot that can maintain its balance using a tail-like mechanism. This robot, presented in a paper published in Springer’s Proceedings of 2020 Chinese Intelligent Systems Conference, is made up of a main body, two wheels and the tail-inspired component that helps it to retain its balance.
The robot’s ‘tail’ is controlled by an adaptive hierarchical sliding mode controller, which allows it to rotate in different directions within an area parallel to the robot’s wheels. Essentially, this controller defines and implements the movements of the tail-like component, ensuring that they enhance the robot’s stability as it navigates its surrounding environment.
To allow the robot to keep its balance as it moves in dynamic or changing environments, the controller uses estimates of uncertainty. The artificial ‘tail’ moves in specific patterns that are designed to increase the robot’s stability and are calculated using the so-called Lyapunov stability theorem. Lyapunov stability is a theoretical construct that describes the stability of dynamic systems, introduced by Russian mathematician and physicist Aleksandr Lyapunov.
Most existing approaches for balancing vehicles with two wheels work by collecting a vehicle’s body altitude data using an inertial measurement unit (IMU). IMUs are electronic devices that can measure a specific force acting on a body or object, as well as angular rates, orientation and so on. Conventional approaches for balancing two-wheeled robots robots process the data collected by an IMU device via a controller component and then implements balancing strategies accordingly, typically by adjusting its tilt angle.
While many of these approaches achieved satisfactory results, the design proposed by the researchers introduces a viable alternative that does not involve adjusting the robot’s tilt angle via the wheel motors. It is one of the few existing techniques to enhance a wheeled robot’s balance while considering uncertainty in the environment that are inspired by the tails of animals.
The researchers evaluated the effectiveness of the tail-like robotic mechanism in a series of simulations. Their findings were very promising, as when the robot lost its balance in this simulated environment the artificial ‘tail’ was able to re-balance it within approximately 3.5s. Moreover, they found that the controller component they created was particularly robust to noise and disturbances.
In the future, the tail-like mechanism developed by this team of researchers could be adapted to enhance the stability and balance of other existing or newly developed robots. In addition, the findings gathered as part of this study could inspire other roboticists to design similar tail-like components.
So far, the researchers at Beijing Institute of Technology only evaluated their self-balancing robot in simulations, thus they are yet to ascertain its effectiveness in tangible physical environments. In their next studies, they plan to build a prototype of the robot and conduct further experiments to test its performance in real-world scenarios.
Cockroaches and lizards inspire new robot developed by researcher

More information:
Control and application of tail-like mechanism in self-balance robot. Proceedings of 2020 Chinese Intelligent Systems Conference(2020). DOI: 10.1007/978-981-15-8458-9_76.
2020 Science X Network
Citation:
A self-balancing robot with a tail-like component (2020, November 3)
retrieved 3 November 2020
from https://techxplore.com/news/2020-11-self-balancing-robot-tail-like-component.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.

