
The robotic explorer GLIMPSE, created at ETH Zurich and the University of Zurich, has made it into the final round of a competition for prospecting resources in space. The long-term goal is for the robot to explore the south polar region of the moon.
The south polar region of the moon is believed to contain many resources that would be useful for lunar base operations, such as metals, water in the form of ice, and oxygen stored in rocks. But to find them, an explorer robot that can withstand the extreme conditions of this part of the moon is needed. Numerous craters make moving around difficult, while the low angle of the sunlight and thick layers of dust impede the use of light-based measuring instruments. Strong fluctuations in temperature pose a further challenge.
The European Space Agency (ESA) and the European Space Resources Innovation Center ESRIC called on European and Canadian engineering teams to develop robots and tools capable of mapping and prospecting the shadowy south polar region of the moon, between the Shoemaker and the Faustini craters. To do this, the researchers had to adapt terrestrial exploration technologies for the harsh conditions on the moon.
Semi-autonomous off road
One of the thirteen lunar rovers taking part in the competition comes from Zurich and is called GLIMPSE (Geological Lunar In-Situ Mapper and Prospector for Surface Exploration). The robot, which looks a bit like a dog, can move across terrain semi-autonomously on its four legs, and is fully equipped with a variety of spectrometers to recognize rock types.
Florian Kehl of the Spacehub at the University of Zurich (UZH) is leading the GLIMPSE project together with Hendrik Kolvenbach from the Robotic Systems Lab at ETH Zurich. Kehl, who previously spent five years at NASA’s Jet Propulsion Laboratory at the California Institute of Technology searching for extraterrestrial life, is scientific director of the project, while Kolvenbach is overall project manager and responsible for robotics. As well as the two main stakeholders UZH Space Hub and ETH Robotic Systems Lab, researchers and engineers from Lucerne University of Applied Sciences and Arts, the University of Basel and the companies Maxon, ANYbotics and Metrohm are also involved.
The robotics behind GLIMPSE are based on the ANYmal robot type developed by ETH spin-off ANYbotics. The GLIMPSE robot has instruments for petrographic and chemical rock analysis, including a Raman spectrometer, a microscope and a camera with zoom lens for overview and close-up images.
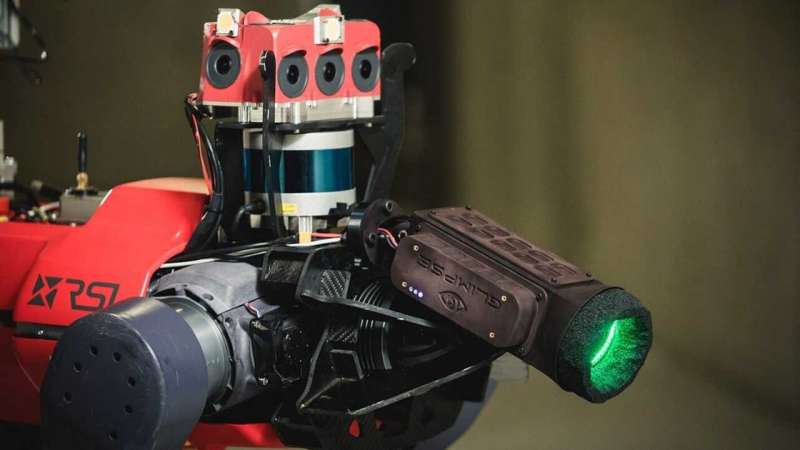
The GLIMPSE robot has instruments for petrographic and chemical rock analysis, including a Raman spectrometer, a microscope and a camera with zoom lens for overview and close-up images. © Team Glimpse
Test run in artificial lunar landscape
GLIMPSE has already successfully passed its first test. Along with 13 other robot explorers, it showed its skills in navigating an artificial lunar landscape set up specially for the competition in a hangar in the Netherlands.
GLIMPSE had two and a half hours to find its way through the unfamiliar lunar landscape to a specific crater where it then had to analyze the rocks. “Afterwards, we had another hour and a half to analyze the data,” says Kehl. “It was a very tight time frame.”
The teams did not have a direct view of the lunar landscape—navigation was based on the robots’ camera recordings and on location data made to resemble satellite images. One of the difficulties was that control signals reached the rovers with a time delay. In order to simulate real conditions, the connection with the robots was sometimes even lost altogether. “Robots with mature autonomous control technology had an advantage under these circumstances,” says Kehl.

Five teams have made it to the final
The competition revealed the robots’ strengths as well as their weaknesses: Some did not have sufficient lighting, others had problems with the batteries or struggled with the artificial signal delay. Not all of the 13 participating rovers made it all the way to the crater.
“We also encountered various difficulties,” says Kehl. Nevertheless, compared to its competitors, most of which had wheels or tracks, the four-legged GLIMPSE proved to be particularly capable and agile off-road. The dog-like robot successfully passed the first round of the competition, winning 75,000 Euros for the team.
The researchers are now working round the clock to optimize GLIMPSE for the final round which will take place in Luxembourg later this year. Five teams have made it to the final. The winners stand to gain 550,000 Euros to use for the further development of their robot designs. It’s conceivable that GLIMPSE could be used in a real ESA mission to the south pole of the moon sometime in the next decade. We’ve got our fingers crossed for GLIMPSE and its team.
Citation:
Robot dog may get to go to the moon (2022, May 12)

